屏蔽空间自组通信与协同探测
针对屏蔽空间的弱通联、高复杂、信息非对称等特点,研究屏蔽空间无人机群动态自组通信、屏蔽空间无人集群协同探测等,建立复杂弱联通环境中感知与通信检测平台,包含弱光照感知机理与能力测试场景、抗干扰通信机理与能力测试场景、复杂环境探测机理与能力测试场景、数据采集与分析系统等,实现隧道、车库、洞穴等屏蔽空间无人系统通信与探测,提高无人系统在屏蔽空间中的自适应能力
新型机构无人机
针对传统无人机在性能、适应性和应用场景上的局限性,设计新型机构无人机,通过新型仿生机构设计、仿生控制机制、多模态耦合协同算法等方面突破,为无人机赋予超越自然生物的跨域多模态运动、智能传感检测、灵巧操作等能力,为重大基础设施探测、低空经济、未来空间全域无人系统等提供理论基础与技术支撑
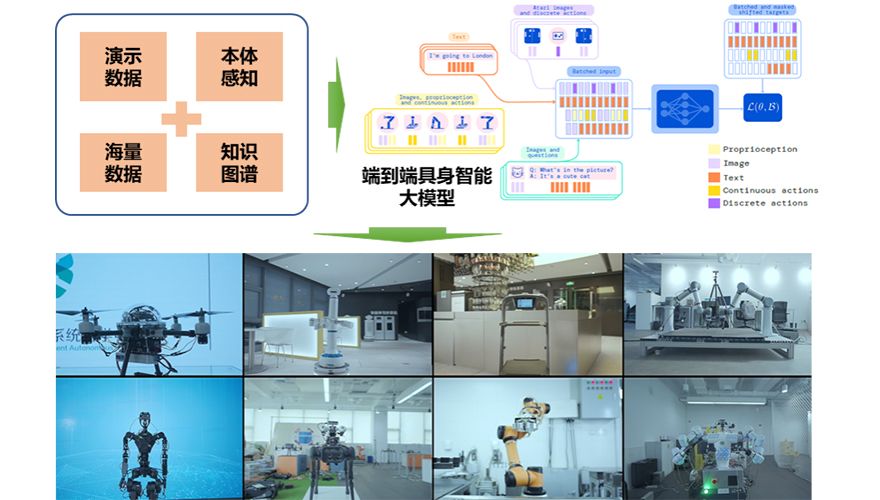
机器人具身智能发育与操作
随着机器人与人工智能技术的发展,机器人逐步拥有了自主智能的操作能力,可代替人类完成更加复杂的操作任务。传统强化学习、模仿学习或基于模型的方法可以使机器人具备一定的操作技能,但仅限于结构化工作环境和单一固定任务的作业场景。随着大模型能力的不断提升,以及人类示教数据、仿真平台、任务集合的不断完善,大模型和具身智能的结合将成为人工智能的下一个浪潮,有望提升现有机器人模仿学习、强化学习、模型预测控制等...
无人机协同感知与检测
针对复杂空间智能检测,建立无人系统自主智能验证平台,研究复杂空间下自主飞行与集群协同机理,提出了基于无人机的系统识别与损伤检测方法,支撑无人系统自主协同与技术应用。在水电站地磁场屏蔽、无GPS导航信号、无光环境下实现了无人机全自主飞行,为隧道检测数字化提供快速、简捷、高效、可靠的手段,突破了重大基础设施安全隐患的智能感知与探测技术,率先实现了高落差密闭空间自主飞行(见图:典型应用1),在近万亩林区...
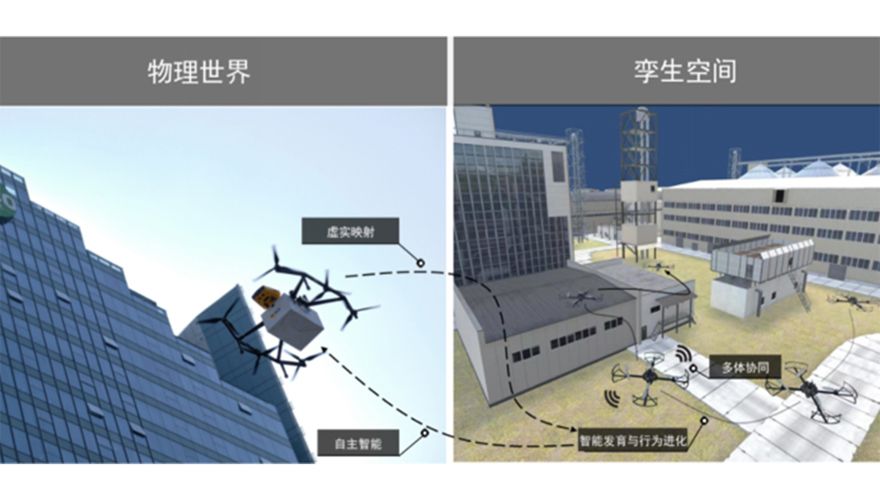
信息融合与数字孪生
围绕机器行为学重大前沿科学问题,建立CPHS数物融合驱动的无人系统单体发育与多体协同进化理论体系,研究全域智能感知与场景认知理论及元宇宙信息接口、协议、模型构建方法,构建几何、物理、语义等多层级信息融合的机环交互数字孪生仿真系统,建立跨领域、跨类型、跨尺度的CPHS三元空间多模态虚实融合映射模型,提出复杂场景中多粒度高动态多体协同仿真推演方法,形成支撑无人机、无人车、机器人长期自治发育的感知大数据
机器人多模感知与自主导航
感知是自主智能无人系统的神经末梢,实现多维度多功能的传感探测,是现代信息技术的重要组成部分,是实现自动检测和自动控制的首要环节。针对复杂场景下视频、图像、语音以及其他交互模态,研究跨时空、跨模态数据处理和知识理解,研究和突破复杂场景下知识(视频、语音、图像等)的表征与描述、认知及推理。针对自主智能体在智能制造、智能城市、智能医疗等各种场景的应用,研究大规模场景中智能体自主建图、定位、导航技术;...