机器人具身智能发育与操作
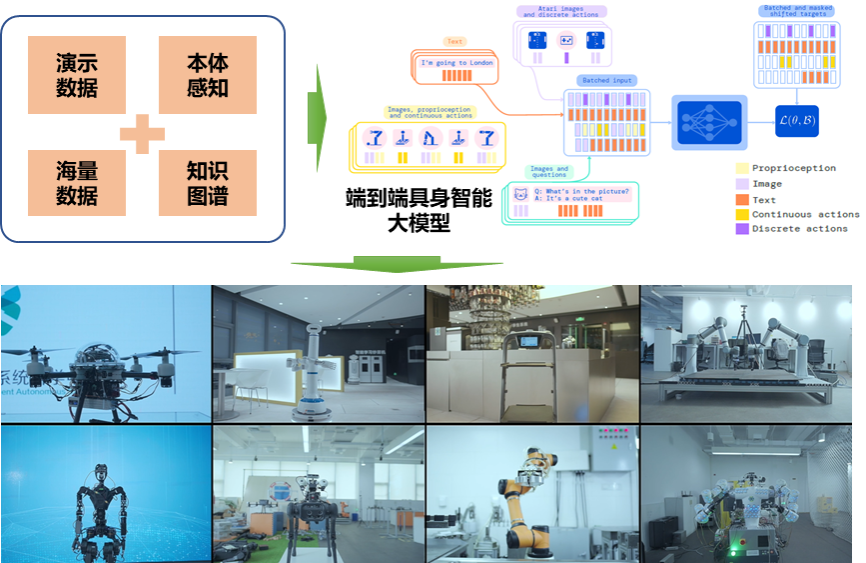
随着机器人与人工智能技术的发展,机器人逐步拥有了自主智能的操作能力,可代替人类完成更加复杂的操作任务。传统强化学习、模仿学习或基于模型的方法可以使机器人具备一定的操作技能,但仅限于结构化工作环境和单一固定任务的作业场景。随着大模型能力的不断提升,以及人类示教数据、仿真平台、任务集合的不断完善,大模型和具身智能的结合将成为人工智能的下一个浪潮,有望提升现有机器人模仿学习、强化学习、模型预测控制等具身智能发育数据效率和任务泛化能力。本方向采用大模型驱动的具身智能方法,设计基于具身大模型的端到端机器人通用技能学习框架,建立机器人通用技能训练场,使机器人在复杂场景中持续学习并获取长序列任务操作技能,实现大规模机器人高效智能发育与进化。相关方法已经应用于人形机器人、四足机器人、双臂机器人等平台,实现了跨平台机器人持续学习与智能发育。