GPU 超算平台
针对科研领域AI模型的开发及训练场景,建立弹性 GPU 集群管理调度,配备10余台GPU超算节点共含80块NVIDIA顶级显卡、峰值算力达7PFLOPS,并行存储聚合存储 2PB,实现基于容器 的资源调度、部署运行、服务发现、扩容缩容等功能,针对无人系统虚实融合高保真仿真及交互发育场景,优化智算资源调度,提供在超算集群中提供基于虚拟机或容器的多个仿真软件大规模并行调度能力,支持仿真计算、AI计算、实时渲染等多种计算范式的硬件适...
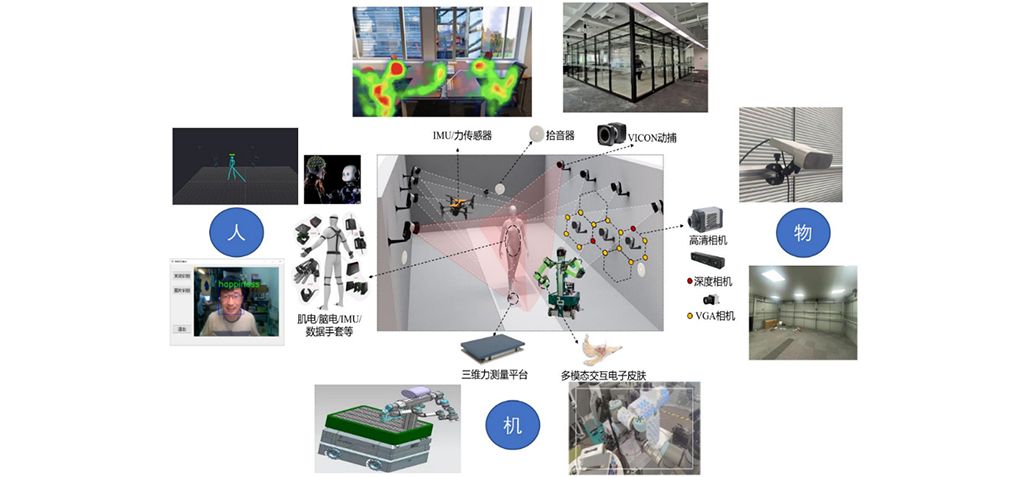
开物实验室
开物实验室围绕无人系统类生命智能发育科学问题,针对当前研究缺乏行为学习数据以及算法依赖于被动数据的局限,以机器人仿人技能学习大数据库及具身交互两个方向为重要抓手,构建人-机-物三元空间高维交互感知大数据表征体系,通过与环境的交互实现智能持续增长,形成机器人发育从“形似”(运动学)到“神似”(动力学),再到“灵似”(智能自涌现)的知识增长新范式。 创新设计了数物融合的无人系统高效学习实验平台,主要硬...
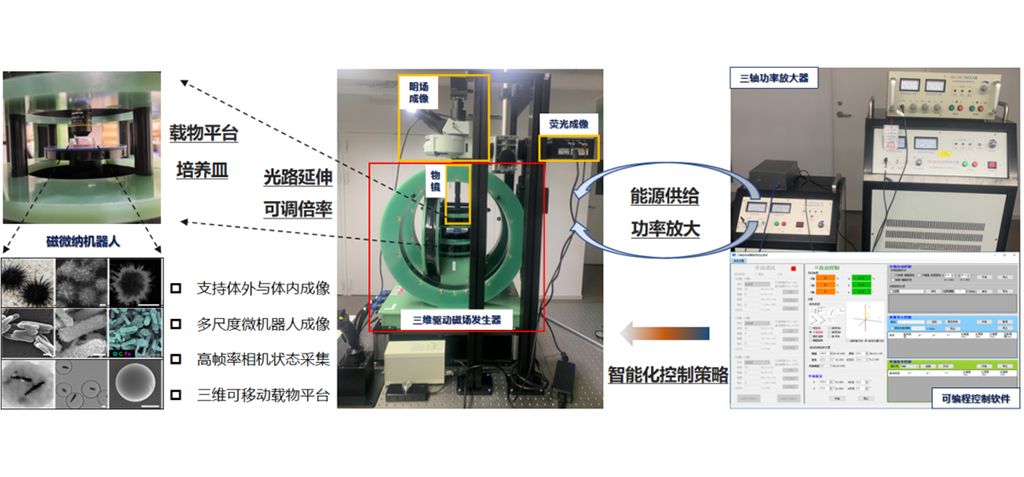
磁控微纳平台
微纳机器人(Micro/nano robots)是尺度在微纳米级别(几纳米至几百微米)的小型化机器人,融合了先进的微纳制造技术以及智能的机器人控制策略。为实现磁性微纳机器人单体和集群在靶向送药、精准医疗、生物传感等领域的高精度操控,构建了磁控微纳平台,包括显微视觉成像系统、三轴亥姆霍兹线圈磁驱动系统、智能控制算法设计系统,可实现明场及荧光成像,提供高精度微机器人状态信息反馈,提供多类型、高均匀度的时间空间可变磁场,...
腿足机器人虚实融合行走模拟系统
针对腿足机器人复杂地形自主稳定行走难题,建立了虚实融合行走模拟系统,包括全地形模拟平台、小型吊装系统、行走扰动系统、以及机动能力全空间数据采集与分析系统,从而实现基于虚拟现实和机器人技术的多合一腿足机器人行走训练与智能评估,支撑人形机器人、四足机器人等腿足机器人平台非结构化环境行走能力提升
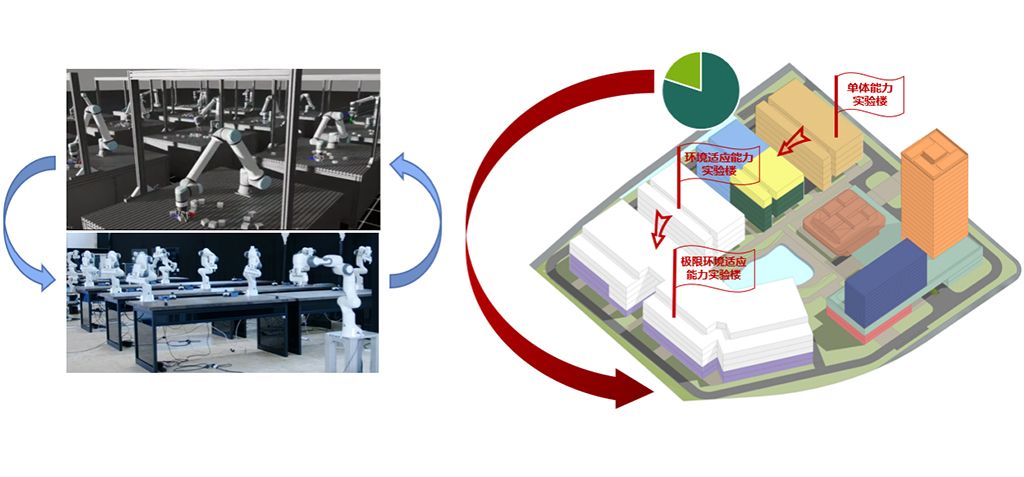
机器人集群训练场
针对机器人在复杂动态场景中通用操作能力弱及虚实迁移难的问题,面向真实物理世界中包含动力学过程及长序列的操作任务,依托国家重大科学基础设施,建立机器人集群训练场,包括百台级异构机器人本体及其集群训练策略,从而为示教学习、虚拟仿真迁移、真实世界强化学习等提供统一的通用学习架构与训练平台
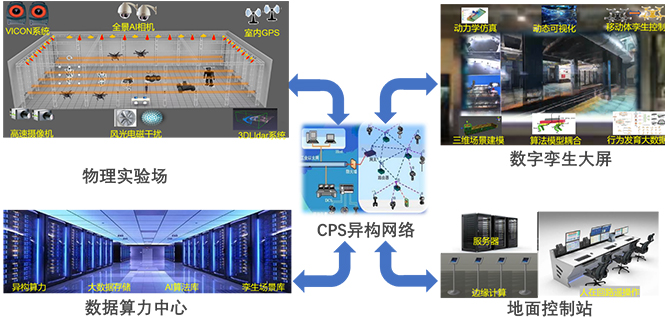
无人系统虚实融合发育场
为获取无人系统研究必备的安全可控的场景感知大数据,支撑无人系统的虚拟交互发育与学习进化,构建了具备虚实融合功能的自主智能无人系统可信交互智能发育平台,包括全域高精度高速红外动作捕捉系统、视觉智能辅助动作捕捉系统、数字孪生一屏集控系统、千台异构数据算力中心及无人系统集群地面控制站等系统设备,可实现平台内全场景、高动态环境的感知,支持不少于50台单体高精度位姿实时感知与状态监测,支持分布式无人系统集...