

-

实验室成果发表在ICLR26国际会议
2026.06.01EmoPrefer:大模型能理解人类对不同情感表示的偏好吗?论文链接: https://openreview.net/pdf?id=EhA4znYsuG代码链接:https://github.com/zeroQiaoba/AffectGPT/tree/master/EmoPrefer论文作者:连政(同济大学)、孙立才、陈岚、陈皓宇、程泽浜、章帆、贾子钰、马子阳、马飞、彭小江、陶建华 描述性情感识别(DMER)旨在利用自然语言来描述人类的情感状态。与依赖预定义情感分类体系的传统判别式方法不同,DMER采用了一种生...
查看详情 -
实验室成果被人工智能顶级学术会议ICML2026录用
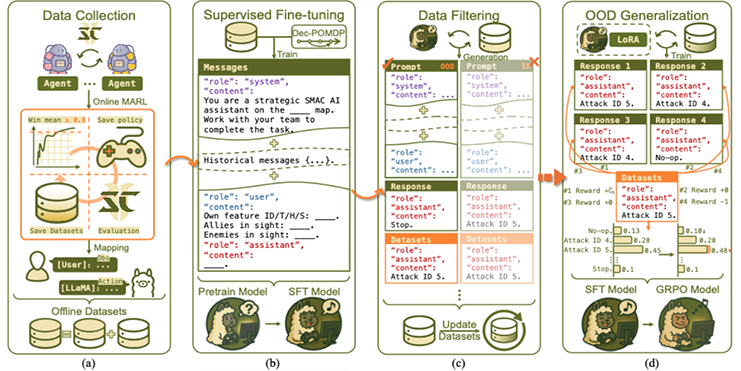
2026.06.01实验室在大语言模型驱动的多智能体决策研究方面取得重要进展。相关研究成果以题为《DLM: Unified Decision Language Model for Offline Multi-Agent Sequential Decision Making》被国际机器学习顶级会议 ICML 2026 录用并评选为 Spotlight 论文。ICML(International Conference on Machine Learning)是机器学习领域公认的国际顶级学术会议,也是中国计算机学会(CCF)推荐 A 类会议。本届会议共收到 23,918 篇有效投稿,录用...
查看详情 -

何斌:打造具身智能新基建场景 推动物理AI发展
2026.05.10同济大学教授、自主智能无人系统全国重点实验室副主任何斌作主题分享。孙宁摄人民网北京5月10日电 (记者焦磊)5月9日下午,“可信语料筑基,智能生态共赢——2026人民网数据智能伙伴大会”在人民日报社举行。同济大学教授、自主智能无人系统全国重点实验室副主任何斌在主题分享环节表示,当前人工智能正从判别式智能、生成式智能进入智能体时代,下一阶段将迈向物理AI或自主智能,具身智能需要进一步推进与社会环境协作,进入...
查看详情 -
实验室成果被《Cyborg and Bionic Systems》接收
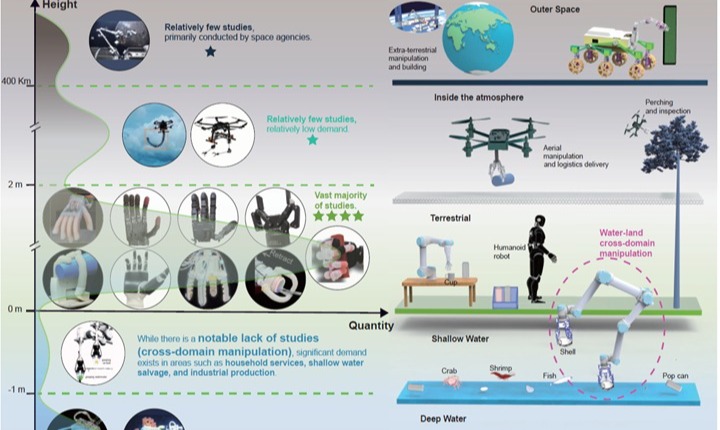
2026.04.29机械手是机器人执行任务的关键工具。陆地和水下机械手在科研和应用方面均受到科学家和工程师的广泛关注。本综述沿着任务执行闭环,从机构设计、感知模态和控制方法三个核心方面,系统考察并比较了这两类机械手的研究进展与挑战。同时本文也总结了跨域机器人机械手所面临的启示与挑战,不仅为机械手建立了统一的“结构—感知—控制”分析框架,也讨论了跨域机械手的潜在未来发展方向,为相关领域学者提供了整体性的认知图谱和综...
查看详情 -
实验室成果被ICRA 2026 接收
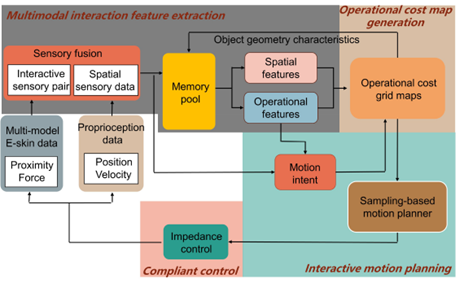
2026.04.29围绕机器人在出轨场景的交互式运动规划问题,提出了具有操作意识的交互规划框架PaiP,可应用于机器人在家居场景下的自主作业。论文信息:Chengjin Wang, Zheng Yan, Yanmin Zhou, Runjie Shen, Zhipeng Wang, Bin Cheng, Bin He. PaiP: An Operational Aware Interactive Planner for Unknown Cabinet Environments. 2026 ICRA
查看详情 -
实验室成果在《IEEE/ASME Transactions on Mechatronics》上发表
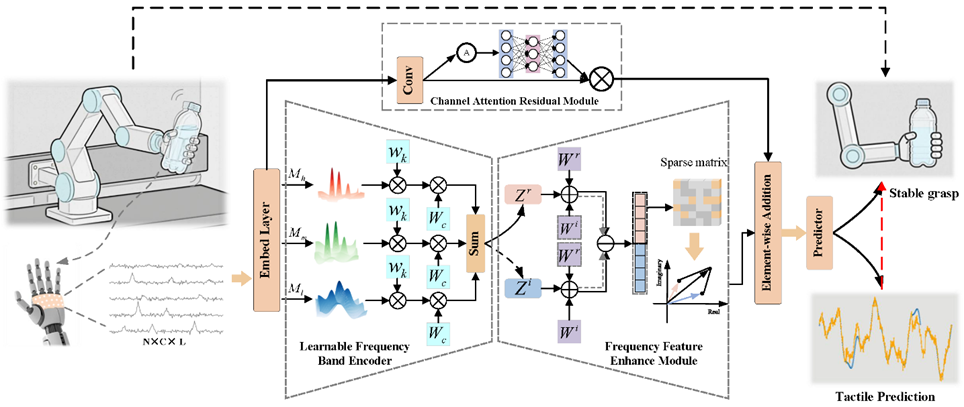
2026.04.29围绕灵巧操作过程中基于触觉信息的物体滑动预测难题,提出频率–时间融合网络FTFNet,实现灵巧操作中基于触觉的物体滑动高精度预测可应用于灵巧操作中意外滑动预测。论文信息:Li X , Luo Y , Wang W ,et al.FTFNet: A Frequency–Time Fusion Network for Slip Prediction in Dexterous Robotic Manipulation[J].IEEE/ASME Transactions on Mechatronics, PP[2026-04-29].DOI:10.1109/TMECH.2026.3676123
查看详情 -
实验室成果在《IEEE Sensor Journal》上发表
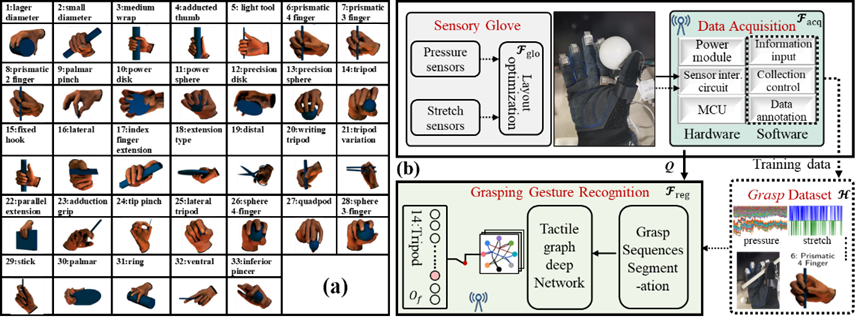
2026.04.29提出了面向细粒度人类抓握识别的数据手套系统 GloG。该系统通过抓握分类引导的传感器布局优化,采用11个压力传感区域和2个拉伸传感通道采集手部接触与弯曲信息。在此基础上,构建了覆盖Feix分类体系33类抓握动作的多模态数据集,并提出拓扑自适应图Transformer进行识别。系统在标准抓握数据和真实日常物体上均取得较高识别准确率,可为后续机器人操作学习提供人类抓握示范与识别基础。论文信息:Li X , Du S , Jiang R ,et al.A...
查看详情 -

自适应多模态无人机停歇系统-“智能飞鸟”获得工信部2025新域新质创新大赛全国二等奖
2026.04.29团队面向军事国防、防灾减灾、低空经济等国家重大需求,针对当前空中无人系统存在的长时作业能力差、与真实物理环境交互能力弱、任务执行自主性低等问题,创新性提出基于非对称双稳态设计的超快速大折展比停歇机构与人工智能算法引导的自主控制框架,研发了多模态自适应无人机停歇系统装备-“智能飞鸟”,停歇机构自重78g,响应时间0.16秒,折展比8:1,达到国际先进水平,申请发明专利6项(美国专利1项)。在管道、岩石、电缆、...
查看详情

实验室动态


Copyright©2022
同济大学智能机器人与计算感知实验室