

-
实验室成果在《IEEE Transactions on Industrial Electronics》上发表
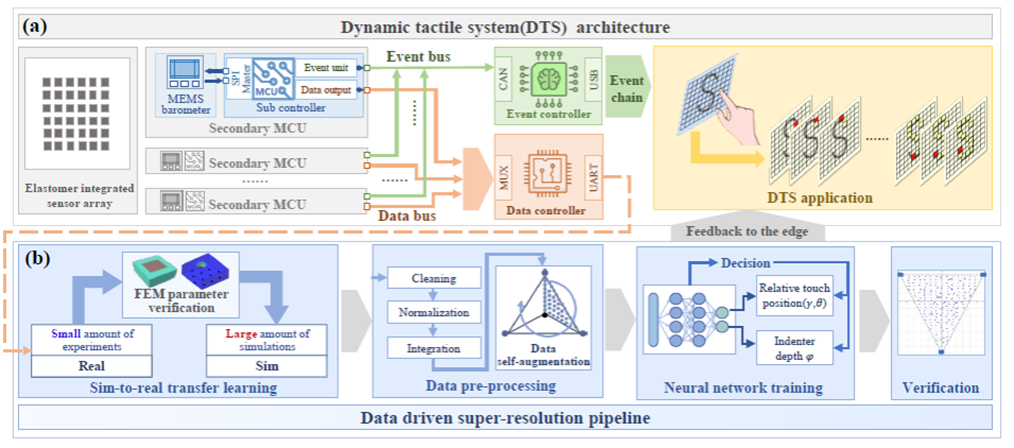
2026.04.29面向现有触觉传感器高空间分辨率与低成本制造难以兼顾、传输处理负载急剧上升制约实时性能的挑战,提出一种基于数据驱动的触觉超分辨率技术,构建动态阈值事件驱动的动态触觉传感器(Dynamic Tactile Sensor, DTS)系统,超分辨率水平达到国际先进。论文信息:Zhou Y , Luo Y , Li J ,et al.Dynamic Tactile Sensor (DTS) With Data-Driven Super-Resolution for Edge Applications[J].IEEE Transactions on Industrial Electro...
查看详情 -
实验室成果被ICRA 2026 接收
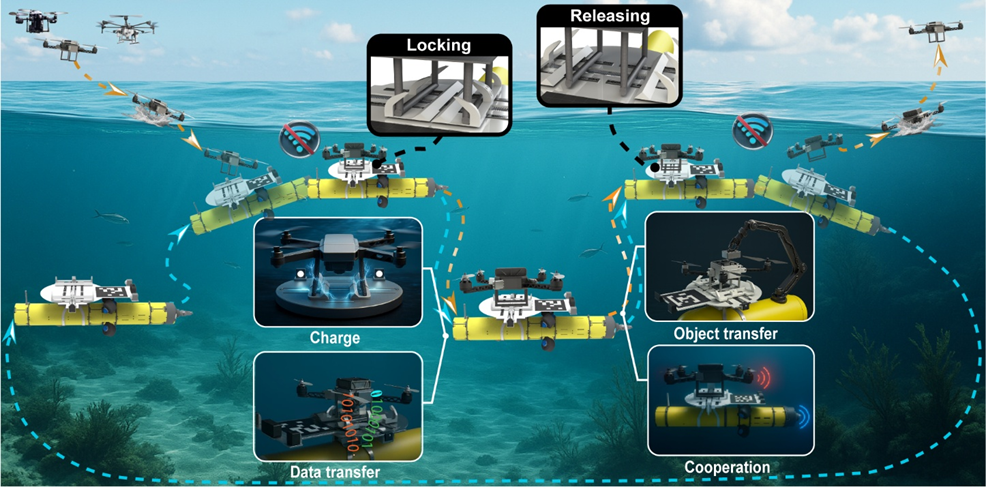
2026.04.29围绕空海跨域协同中无通信环境下的水下自主对接问题 ,提出了基于决策级双模态融合的视触觉状态感知算法 ,研发了一套包含自适应夹持机构的水下快速对接与释放系统 ,可应用于海洋监测、应急响应和水下勘探等领域 。论文信息:Hongchang Liu, Ruiheng Wang, Yongkang Jiang, Shenli Zhang, Xiangdan Zhao, Xin Xu, Yulong Ding, Feng Lyu, Zhipeng Wang, Yanmin Zhou, Bin He. When birds meet fish: vision-force fusion for a...
查看详情 -
实验室成果在《IEEE Transactions on Network Science and Engineering》上发表
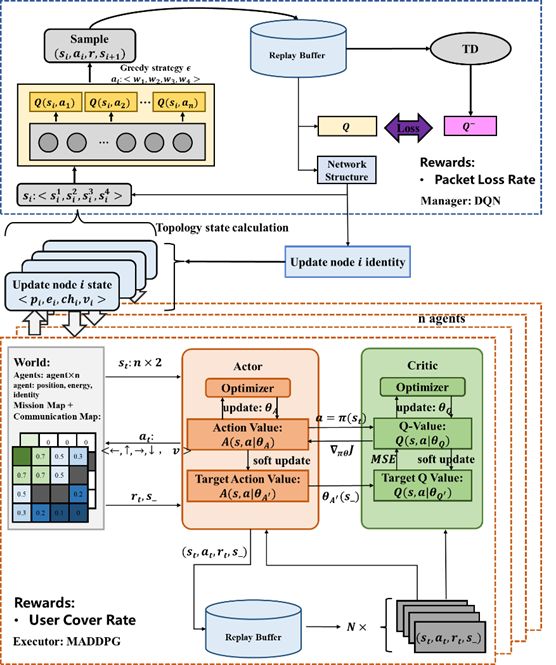
2026.04.29围绕地下屏蔽空间通信信号分布规律复杂、通信网络布设困难等问题,提出了智能自适应通信拓扑(IACTS)方法,使用环境参数敏感的理论通信信号预测模型,结合分层深度强化学习,为多体无人机系统提供通信链路切换、无人机自适应部署的策略指导,具备环境-任务自适应拓扑构建能力,可应用于地下空间多体无人系统通信保障,该方法能够显著提高多无人机自组织网络系统的能量使用率、降低组网丢包,实现复杂地下环境中的快速自适应动...
查看详情 -

实验室成果在《Computer Science Review》上发表
2026.04.29围绕“低光环境下多模态目标检测”这一研究主题,系统梳理了该领域的发展脉络与关键挑战,通过对已有研究的全面回顾与深入分析,明确了当前研究的核心问题、技术路线、数据集资源及评估标准,并对未来研究方向进行了展望。论文信息:Li G , Wang Y , He B ,et al.Low-light multimodal object detection: A survey[J].Computer Science Review, 2025, 58(c):100804.DOI:10.1016/j.cosrev.2025.100804
查看详情 -
实验室成果在《IEEE Control Systems Letters》上发表
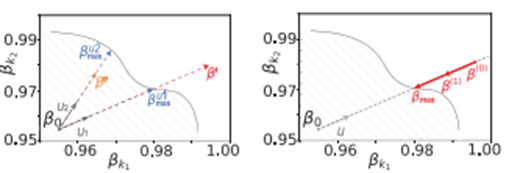
2026.04.29为解决信息物理系统在复杂环境下的安全水平可行域刻画问题,聚焦于处理复杂信息物理网络中由不确定性注入引起的机会约束可行性问题,提出了一种以安全水平最大化为目标的逆向机会约束 OPF 模型。通过构建一个用于可行性验证的代理问题,将原始难处理的安全水平可行域刻画转化为一个单调根寻优问题,并通过类牛顿-拉夫逊方法求解。该方法有效克服了传统框架中安全水平需由外部预先指定的局限性,实现了对安全水平可行边界的精确...
查看详情 -

欢迎徐阳副教授加入实验室!
2026.03.19徐阳,现任同济大学上海自主智能无人系统科学中心副教授、博士生导师。2023年博士毕业于浙江大学电气学院,同年加入浙江大学控制学院孙优贤院士课题组从事博士后工作。2022年-2023年曾于悉尼科技大学机器人研究所公派博士联合培养。2026年3月全职加入同济大学上海自主智能无人系统科学中心。主要从事机器人主动感知探测与规划决策研究,近年在机器人领域国际权威刊物IEEE T-Mech/T-ASE/RA-L/ICRA/IROS等发表论文20余篇,授权国...
查看详情 -

欢迎连政副教授加入实验室!
2026.01.16连政(IEEE/CCF Senior Member),现任同济大学上海自主智能无人系统科学中心副教授。近年来已在情感计算、人机交互、大模型等领域开展一系列研究工作,累计发表论文和专利百余篇,包括IEEE TPAMI, IEEE TNNLS, IEEE TASLP, IEEE TAFFC等顶级期刊和ICML, NeurIPS, ICLR, AAAI, ACM Multimedia, ACL等国际会议,Google Scholar 累计引用 4,500 余次(H-index: 36),入选全球前2%顶尖科学家榜单;作为“多模态高鲁棒细微情感分析...
查看详情 -

实验室成果在2025中国自动化大会获得最佳应用论文奖
2025.10.172025中国自动化大会由中国自动化学会主办、哈尔滨工程大学承办,于2025年10月10-12日在哈尔滨召开,本次大会以“以智赋能,掌控未来”为主题,邀请10位院士与会,3500余名来自学术界和产业界的代表参会。实验室虚实融合相关成果“Virtual-Real Fusion on Diverse Task Scene and Unmanned Systems”被大会接收并在会上进行海报展示。该成果聚焦于虚实融合平台在多任务场景与无人系统中的协同优化与智能演进,创新性提出虚拟环境...
查看详情

实验室动态


Copyright©2022
同济大学智能机器人与计算感知实验室