

-

欢迎侯佳佐研究员加入实验室!
2025.10.01侯佳佐,同济大学上海自主智能无人系统科学中心研究员,博导/硕导,国家高层次青年人才,小米青年学者。于浙江大学、华中科技大学、香港大学获学士、硕士、博士学位;英国帝国理工学院访问学者。新加坡国立大学、美国康奈尔大学博士后研究员。主要研究方向为智能电网安全、具身智能安全、信息物理攻防对抗。近年来以第一作者在Renewable and Sustainable Energy Reviews(影响因子16.3)、IEEE Transactions on Smart Grid、IE...
查看详情 -

欢迎徐梦圆博士后加入实验室!
2025.07.30徐梦圆,2025年6月于同济大学计算机上科学与技术学院取得博士学位,导师:刘庆文教授。于2023年11月至2024年11月,赴加拿大英属哥伦比亚大学(UBC)联合培养,合作导师:Julian Cheng教授。2025年7月加入课题组,研究兴趣包括无线通信感知一体化、协同智能感知等。博士期间,参与多项国自然面上项目等,相关研究成果以第一/通讯作者发表在IEEE TWC, IoTJ等国际期刊,获得国家发明专利授权5项。多次担任IEEE JSAC, TWC, TCOM, TG...
查看详情 -

实验室成果在《IEEE Transactions on Automation Science and Engineering》上发表
2025.06.30实验室在多模态人类意图融合研究中取得新进展,论文“A Novel Human-in-the-Loop Multimodal Intention Fusion Method for Human–Robot Interaction”被期刊IEEE Transactions on Automation Science and Engineering正式接受。本研究针对多模态意图理解中普遍存在的信息冲突、识别准确率和难以满足用户偏好的问题,提出了HIL-MIF—一种人在环路的多模态意图融合方法,用于人机交互。该方法通过引入权重来代表用户对各种模式的...
查看详情 -

实验室成果在2025威尼斯建筑双年展上展出并入选本届威尼斯建筑双年展主展馆军械库(Arsenale)七大核心展项
2025.06.04实验室与同济大学建筑与城市规划学院袁烽教授团队联合设计开发了一套人形机器人感知和动作训练的完整链路系统,该成果在2025威尼斯建筑双年展上展出。本次展览作品名为CO-POIESIS: A Primitive Future of Architectural Intelligence(简称CO-POIESIS),以“建筑智能的远古未来”为主题,通过资源再利用、机器人建造与人形机器人开展跨界对话。展览现场,一台机器人通过传感器即时捕捉旋律与节奏,转化为即兴演奏;另一台机器...
查看详情 -

实验室工作被人工智能顶会ICML 2025录用!
2025.05.05实验室在柔性物体操控方向取得新进展,相关成果“Learning Efficient Robotic Garment Manipulation with Standardization”被人工智能顶级会议International Conference on Machine Learning(ICML) 2025 接收。ICML与NeurIPS、ICLR并称为最具影响力的机器学习三大顶会,每年举办一次。今年是ICML第42届会议,将于7月13-7月19日在温哥华会议中心开幕。本届会议共接收有效投稿12107篇,接收3260篇,录用率为26.9%。本研究聚焦...
查看详情 -

实验室工作被人工智能顶会IJCAI 2025录用!
2025.05.05实验室的研究团队在点云分析领域取得进展,相研究成果以题为“Rotation Invariant Spatial Networks for Single-View Point Cloud Classification”的论文被 IJCAI 2025 录用。International Joint Conferences on Artificial Intelligence (IJCAI)由国际人工智能联合会主办,是人工智能领域的顶级会议之一,也是中国计算机学会(CCF)推荐的A类国际学术会议。IJCAI 2025将于2025年8月16日在加拿大蒙特利尔召开。本届会议共收...
查看详情 -
实验室成果在《Structural Control and Health Monitoring 》上发表
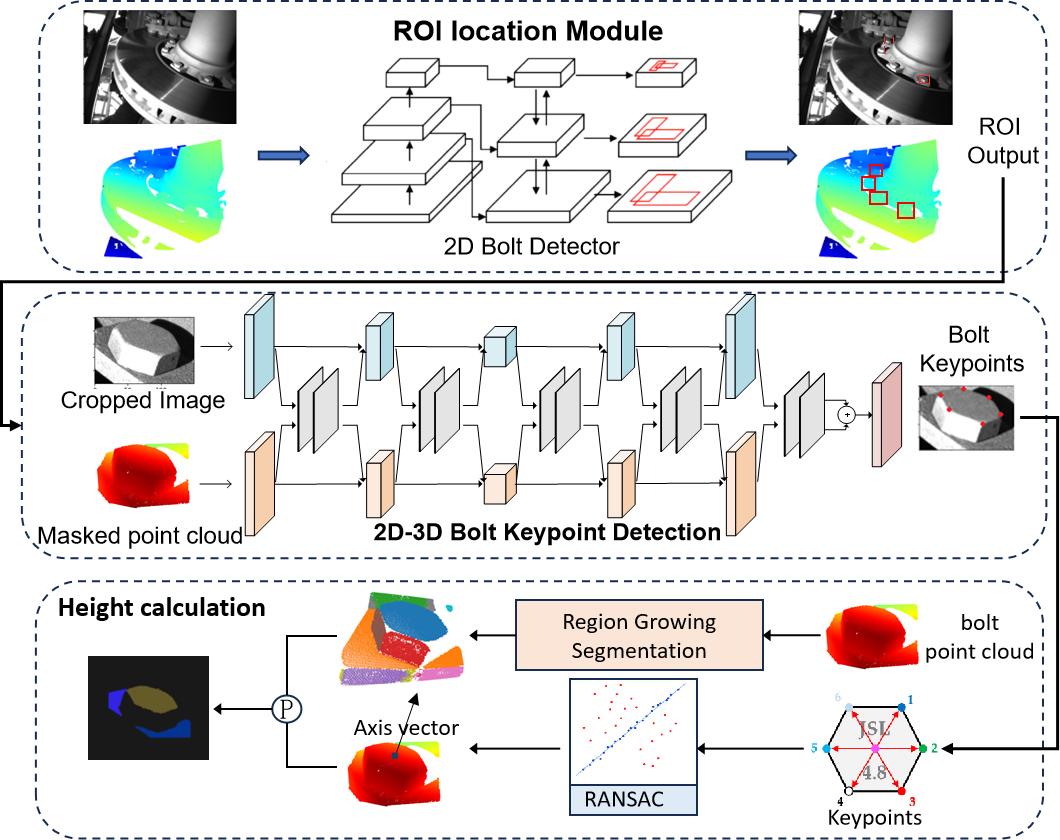
2025.05.14实验室在大型装备自动化健康运维领域取得进展。相关研究成果以题为“Bolt Looseness Quantitative Visual Detection With Cross-Modal Fusion”在线发表于《Structural Control and Health Monitoring》(IF=4.6)。随着高速列车对安全与可靠性要求的日益严格,螺栓松动是影响整机安全性与可靠性的关键隐患之一。螺栓预紧力不足可能导致界面分离、疲劳及自松动,从而引发严重安全事故。然而,底盘螺栓空间狭窄,表面纹理信息不...
查看详情 -
实验室成果在《IEEE Transactions on Multimedia》上发表
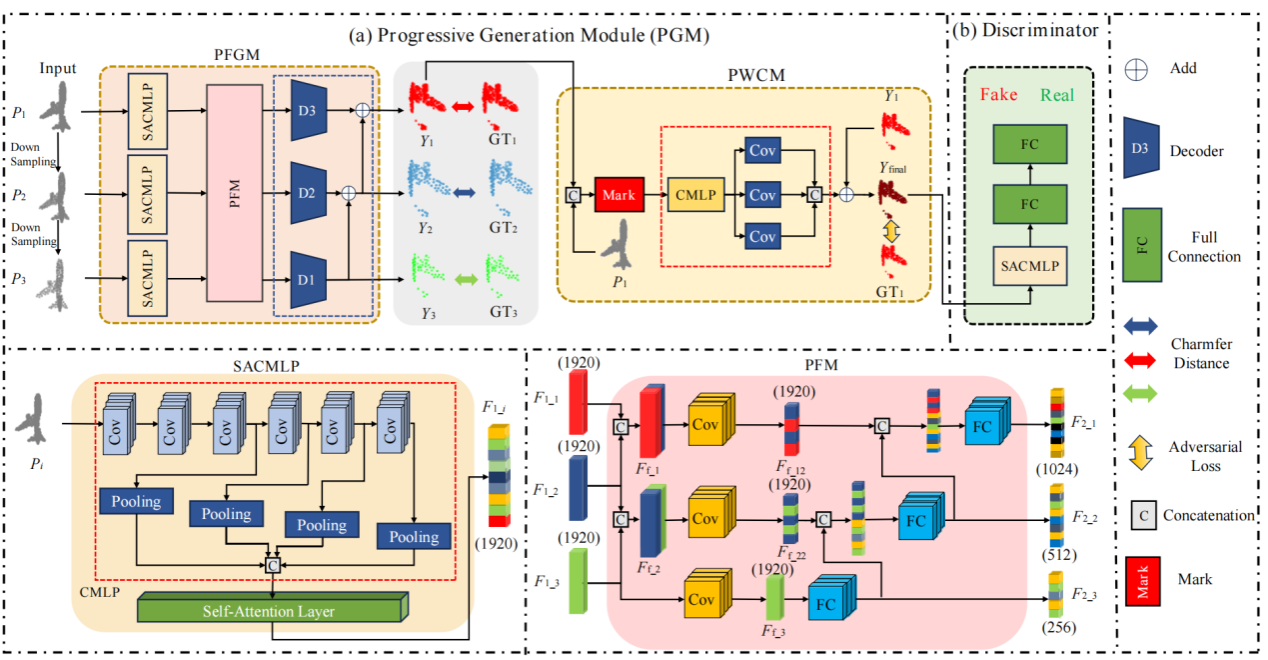
2025.04.18实验室的研究团队在点云重建领域取得进展。相研究成果以题为“Transition-Aware Point Cloud Completion by A Progressive Refinement Generative Adversarial Network“的论文被IEEE Transactions on Multimedia (lF=8.4)期刊录用。三维重建可以帮助机器人和车辆了解周围环境,以便执行后续导航和操作任务。然而,在目标遮挡的情况下,视觉传感器很难获取物体的完整信息。在这项工作中,我们提出了一种渐进细化生成对抗网络(P...
查看详情

实验室动态


Copyright©2022
同济大学智能机器人与计算感知实验室