



实验室成果被ICRA 2026 接收
2026年04月29日
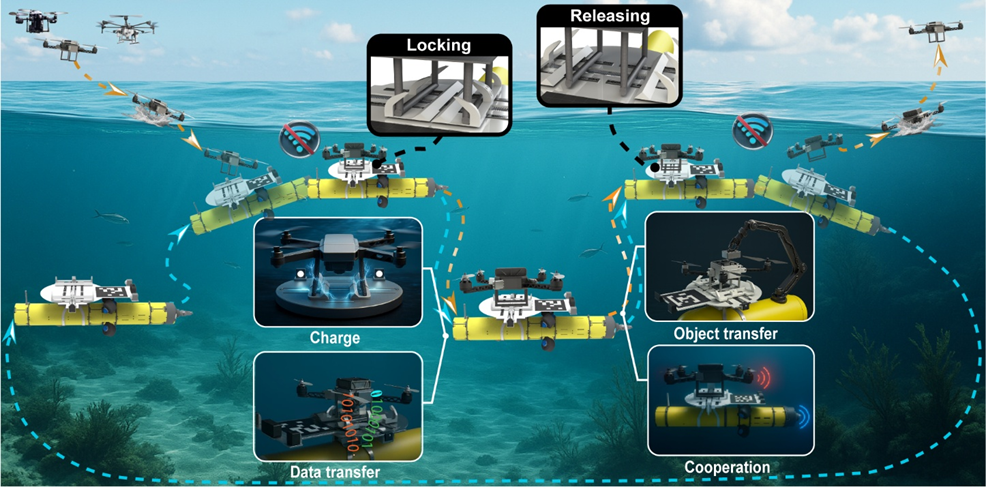
围绕空海跨域协同中无通信环境下的水下自主对接问题 ,提出了基于决策级双模态融合的视触觉状态感知算法 ,研发了一套包含自适应夹持机构的水下快速对接与释放系统 ,可应用于海洋监测、应急响应和水下勘探等领域 。
论文信息:Hongchang Liu, Ruiheng Wang, Yongkang Jiang, Shenli Zhang, Xiangdan Zhao, Xin Xu, Yulong Ding, Feng Lyu, Zhipeng Wang, Yanmin Zhou, Bin He. When birds meet fish: vision-force fusion for autonomous underwater docking in cross-domain avian-aquatic collaboration. ICRA , 2025.
