

-
热烈祝贺张薇博士顺利通过毕业答辩
2025.02.272025年1月21日,课题组2018级直博士生张薇的博土学位论文答辩会在上海自主智能无人系统科学中心16号楼2楼会议室顺利举行。答辩委员会经过认真的评审和无记名投票表决,一致建议授予张薇同学工学博士学位。祝贺张薇同学
查看详情 -
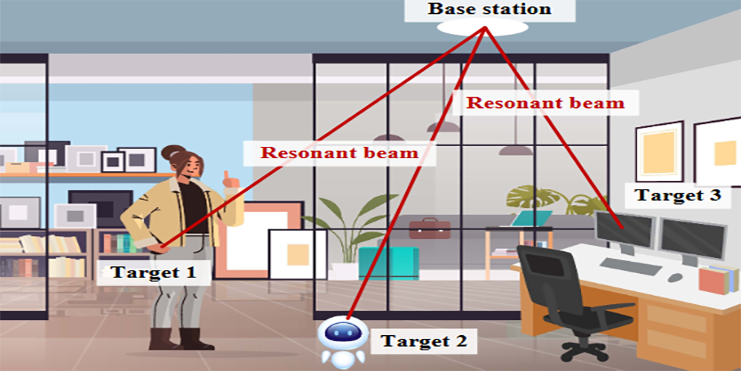
实验室成果在《IEEE Transactions on Wireless Communications》上发表
2025.02.17实验室在如何进行室内高精度定位上取得了重要进展,将谐振光束定位扩展到多目标情景。相关研究成果以题为“Resonant Beam Enabled Multi-Target Localization”的论文,于2025年1月在线出版在《IEEE Transactions on Wireless Communications》(IF=8.9)。在万物互联的时代,精准的多目标定位在各种应用中变得愈发重要,尤其在智能城市、物联网以及无人驾驶等领域。谐振光束系统由于能量传输效率高,具有自建立自对准的良好动...
查看详情 -
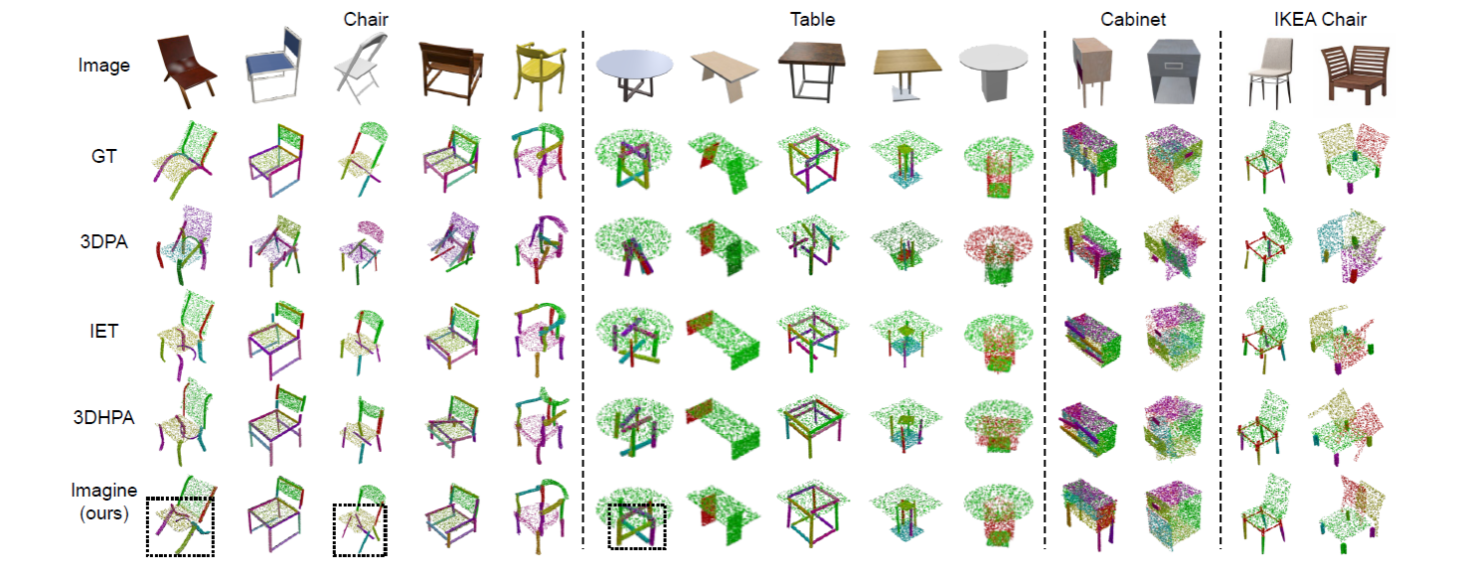
实验室研究成果在《AAAI 2025》上录用
2024.12.24围绕现有三维部件装配领域由于缺乏装配先验导致的装配精度差、新装配体泛化困难的问题,实验室尤鸣宇教授提出了基于结构知识图的单视角图像引导三维部件装配方法,可应用于虚拟装配方案设计。基于该工作成果,科学中心尤鸣宇教授在AAAI 2025上发表题为《Imagine: Image-Guided 3D Part Assembly with Structure Knowledge Graph》的论文。具体情况为:基于单视角装配体图像中提取结构知识图作为先验知识,设计多粒度知识-装配协...
查看详情 -
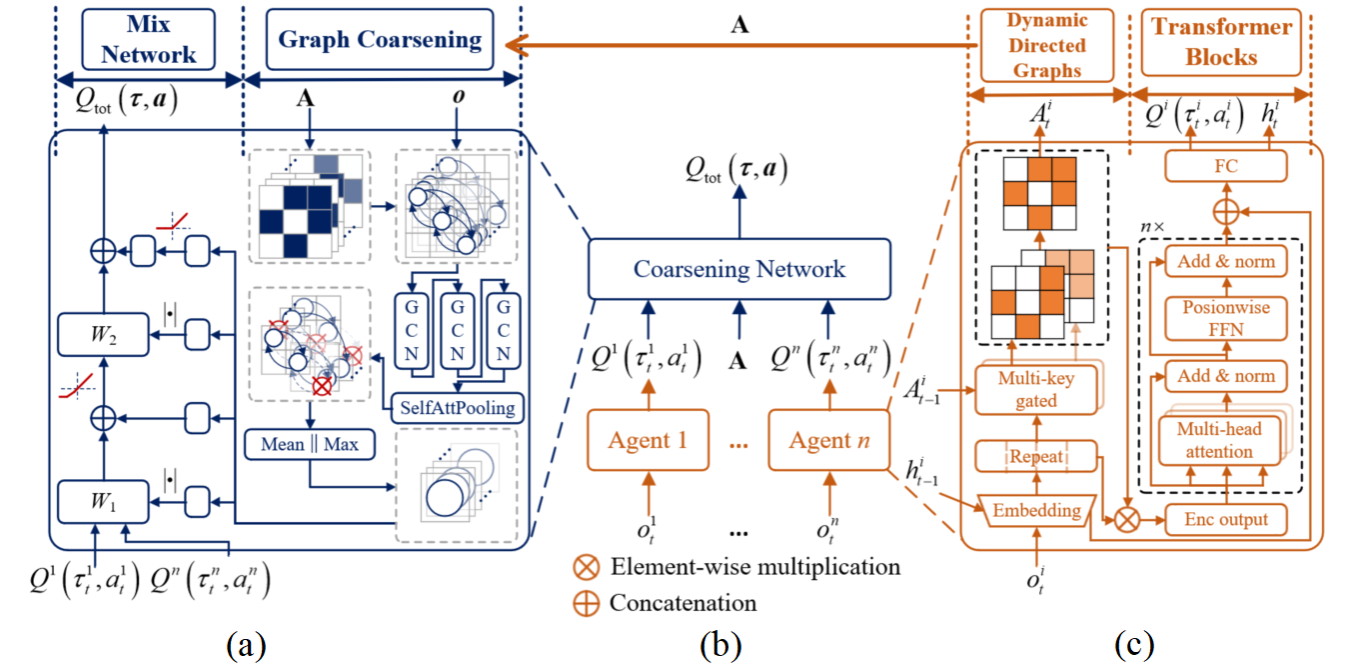
实验室研究成果在《AAAI 2025》上录用
2024.12.24实验室在多智能体强化学习算法研究上取得进展。相关研究成果以题为“Bridging Training and Execution via Dynamic Directed Graph-Based Communication in Cooperative Multi-Agent Systems”被CCF-A类人工智能顶级学术会议AAAI 2025录用。多智能体系统需要有效的通信和理解智能体间的相互作用,以实现合作目标。现有方法缺乏动态通信机制,且过度依赖全局状态。为此,我们提出了基于Transformer的图坍缩网络(TGCNet)算法。T...
查看详情 -
实验室成果在《IEEE Transactions on Smart Grid》上录用
2024.11.27围绕网络化系统赛博攻击这一问题,提出了一种网络拓扑结构未知情况下的序贯攻击策略,该策略首先注入一系列小规模试探性攻击,根据系统对攻击的响应与能观性特征逐步反演得到网络拓扑结构信息,随后基于网络拓扑结构发动一次性大规模攻击。提出的方法适用于智能电网等工业网络系统赛博攻防演练等场景。图:网络拓扑结构辨识效果论文信息:Z. Liu, T. Liu, Y. Song and D. J. Hill, "Consecutive Load Redistribution Attack Wit...
查看详情 -
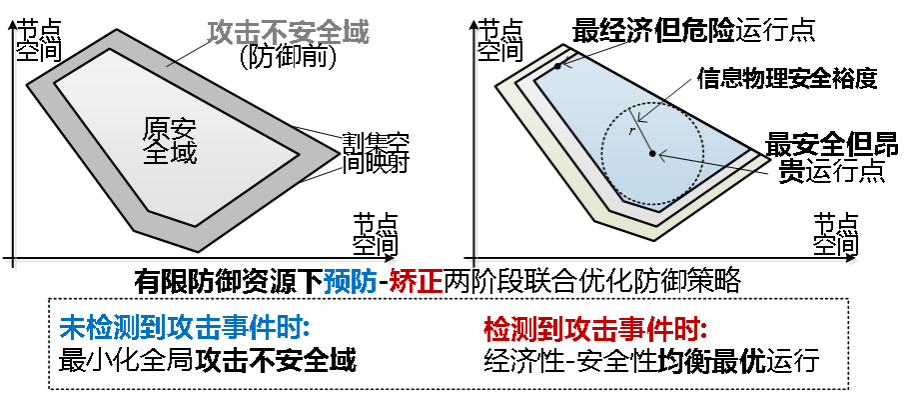
实验室成果在《IEEE Transactions on Power Systems》上录用
2024.11.27围绕有限防御资源下的网络攻击防御问题,基于CPS信息物理安全域的概念与几何刻画,提出了预防-矫正序贯控制策略,建立主从博弈优化模型,求解未受FDI攻击与受到FDI攻击时的防御资源分配方案,实现了兼顾安全性和经济性的均衡最优防御。图:有限防御资源下的网络攻击两阶段防御论文信息:J. Hou, F. Teng, W. Yin, Y. Song and Y. Hou, "Preventive-Corrective Cyber-Defense: Attack-Induced Region Minimization and Cybersecu...
查看详情 -
实验室成果在《IEEE Transactions on Power Systems》《IEEE Transactions on Sustainable Energy》上录用
2024.11.27围绕网络化系统在网络拓扑结构切换以及agent工作模式切换情况下的稳定控制与运行性能优化,深入分析了网络拓扑结构切换以及agent工作模式切换对多体系统运行的影响机制,针对切换动作引发的强烈非线性模态提出了基于光滑逼近与凸松弛相结合的建模与求解方法,有效提升了切换情况下稳定约束运行优化问题的求解效率,可应用于智能电网等典型工程网络化系统。基于该工作成果,在IEEE Transactions on Power Systems上发表题为Chanc...
查看详情 -
实验室成果在《IEEE Control Systems Letters》上录用
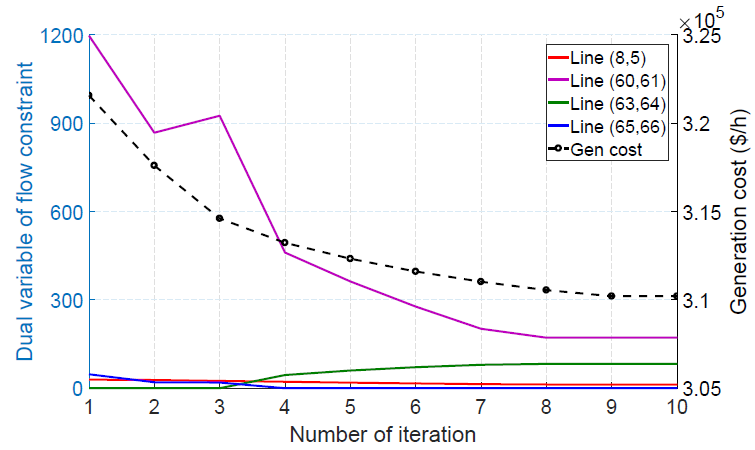
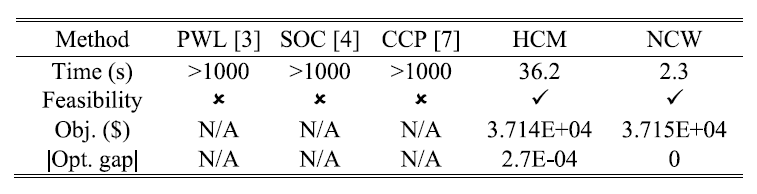
2024.11.26围绕网络流优化模型强烈非凸性难以设计分布式解法的问题,揭示了含非凸二次型约束的典型网络流优化问题所隐含的凸性质,证明了网络流优化问题的对偶间隙为零,由此提出了基于网络流优化对偶凸问题的分布式算法(Hidden convexity-based method,HCM),可应用于能源互联网等典型工程网络流系统的优化调度。图:提出的HCM分布式算法与传统集中式算法性能对比论文信息:Liu R P , Song Y , Liu J ,et al.Hidden Convexity-Based D...
查看详情

实验室动态


Copyright©2022
同济大学智能机器人与计算感知实验室