实验室的研究团队在点云重建领域取得进展。相研究成果以题为“Transition-Aware Point Cloud Completion by A Progressive Refinement Generative Adversarial Network“的论文被IEEE Transactions on Multimedia (lF=8.4)期刊录用。
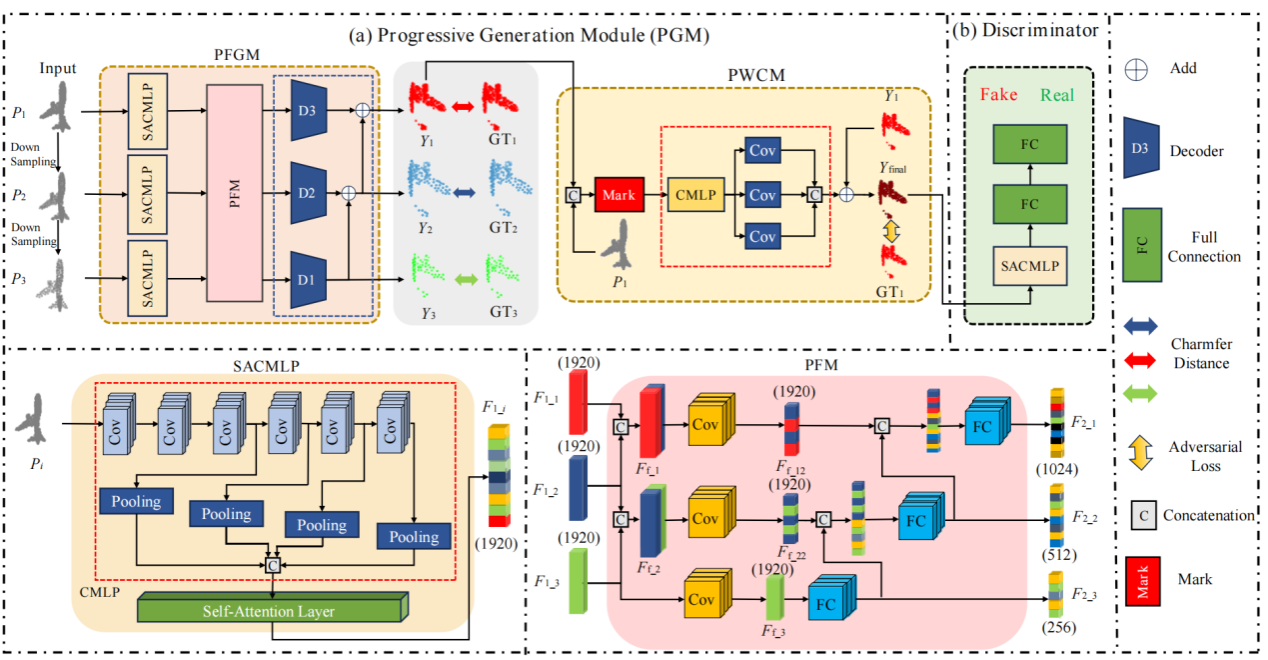
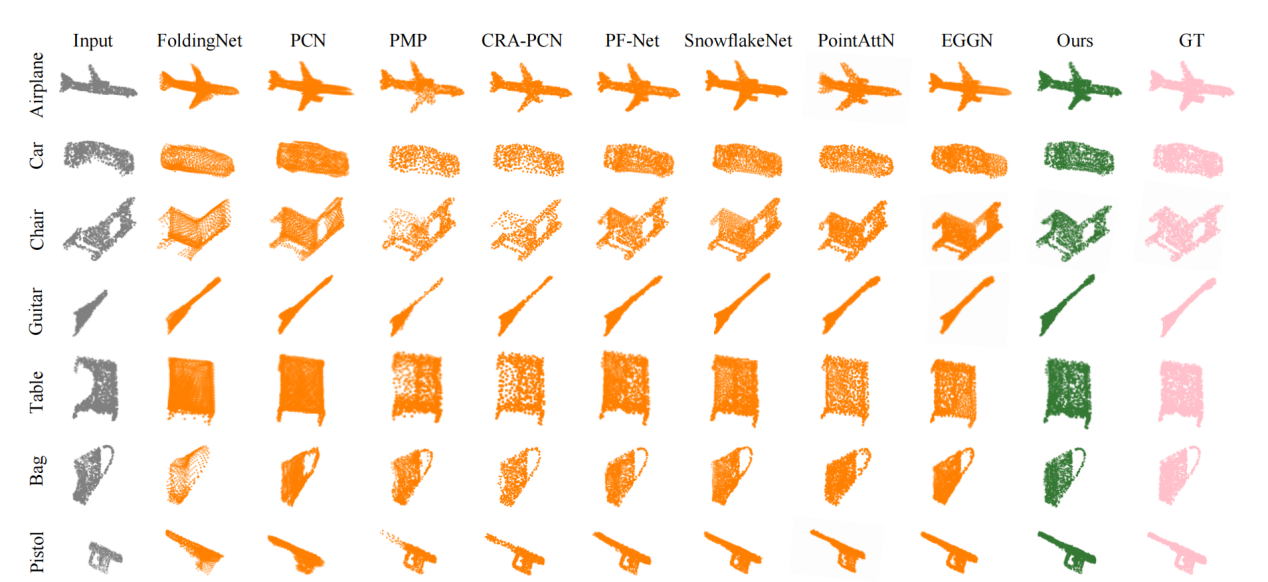
三维重建可以帮助机器人和车辆了解周围环境,以便执行后续导航和操作任务。然而,在目标遮挡的情况下,视觉传感器很难获取物体的完整信息。在这项工作中,我们提出了一种渐进细化生成对抗网络(PR-GAN) 来恢复物体的形状。这种方法直接从部分点云中预测缺失的点云。PR-GAN 包含一个渐进生成模块(PGM)和一个判别器。PGM中的编码器用来捕捉局部和全局特征以及它们之间的上下文信息。为了生成精确的点云,我们进一步提出了一个渐进融合模块(PFM),可提取不同尺度点云之间的过渡信息。此外,我们还设计了一个部分-整体关联模块(PWCM),以提取部分点云和整体点云之间的过渡信息,以进一步保留细节。通过上述模块 我们增强了网络的空间逻辑感知能力,从而使 PR-GAN 能够充分提取点云特征并预测高保真点云。我们在三个公共数据集上进行了评估,与其他方法相比,PR-GAN 能够预测更准确的缺失点云。