



实验室工作被人工智能顶会ICML 2025录用!
2025年05月05日
实验室在柔性物体操控方向取得新进展,相关成果“Learning Efficient Robotic Garment Manipulation with Standardization”被人工智能顶级会议International Conference on Machine Learning(ICML) 2025 接收。
ICML与NeurIPS、ICLR并称为最具影响力的机器学习三大顶会,每年举办一次。今年是ICML第42届会议,将于7月13-7月19日在温哥华会议中心开幕。本届会议共接收有效投稿12107篇,接收3260篇,录用率为26.9%。

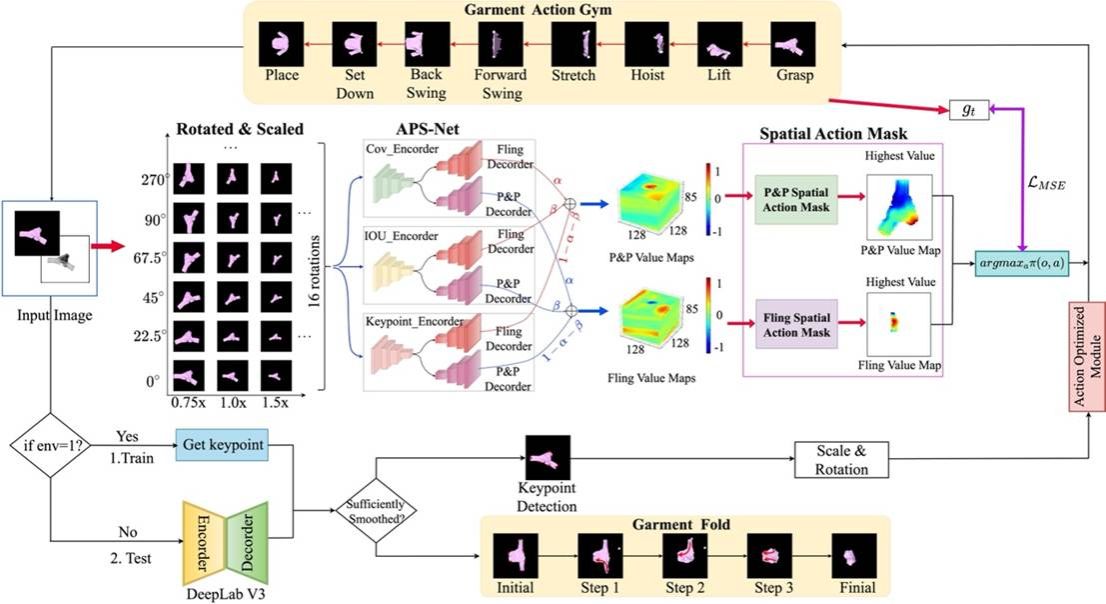
本研究聚焦于衣物衣物易形变、自遮挡且具有复杂的动力学,给服装展开和折叠等操作带来关键挑战。为此,我们提出了 APS-Net 方法,首次将服装的展开与标准化统一,提升了展开效率,并显著简化了后续折叠等任务的复杂度。 APS-Net 结合双臂多策略操控,通过动态抛掷与精准摆放实现高效展开,同时引入奖励机制与优化模块,引导机器人完成标准化对齐。该方法在模拟和真实环境中均表现出优越性能,展示了其在实际应用中的广泛潜力。
论文信息:Zhou changshi, Feng Luan, Hujiarui, Shaoqiang Meng, Zhipeng Wang, Yanchao Dong, Yanmin Zhou, Bin He. Learning Efficient Robotic Garment Manipulation with Standardization. International Conference on Machine Learning.
