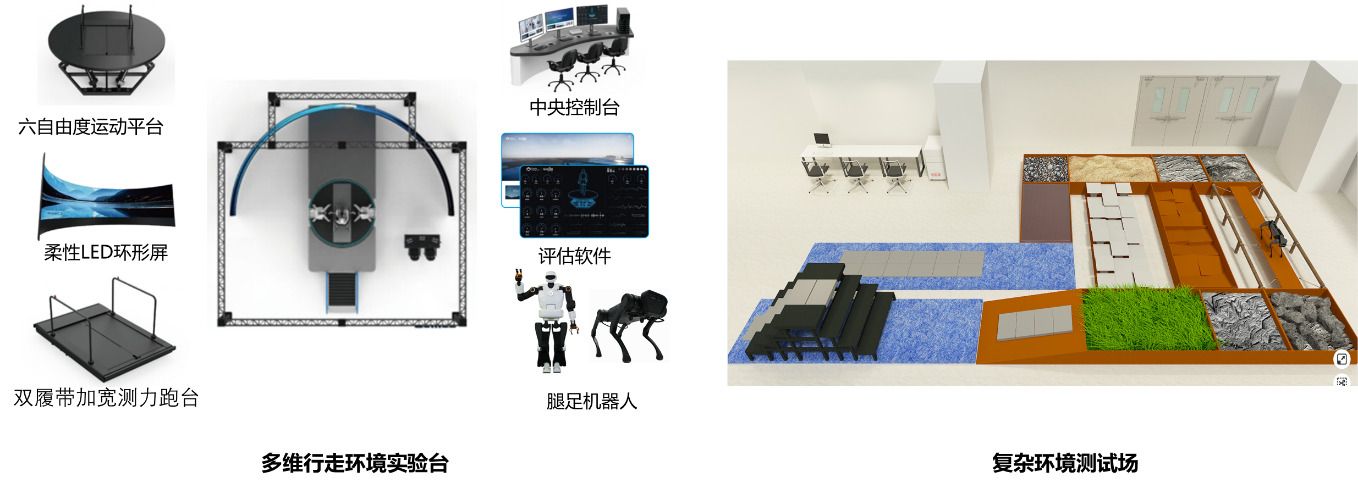
针对腿足机器人复杂地形自主稳定行走难题,建立了虚实融合行走模拟系统,包括全地形模拟平台、小型吊装系统、行走扰动系统、以及机动能力全空间数据采集与分析系统,从而实现基于虚拟现实和机器人技术的多合一腿足机器人行走训练与智能评估,支撑人形机器人、四足机器人等腿足机器人平台非结构化环境行走能力提升。