



实验室成果被ICRA 2026 接收
2026年04月29日
围绕机器人在出轨场景的交互式运动规划问题,提出了具有操作意识的交互规划框架PaiP,可应用于机器人在家居场景下的自主作业。
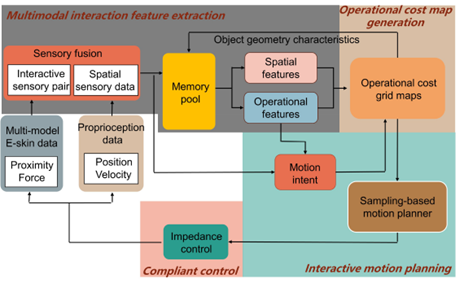
论文信息:Chengjin Wang, Zheng Yan, Yanmin Zhou, Runjie Shen, Zhipeng Wang, Bin Cheng, Bin He. PaiP: An Operational Aware Interactive Planner for Unknown Cabinet Environments. 2026 ICRA .
