



实验室成果在《IEEE/ASME Transactions on Mechatronics》上发表
2026年04月29日
围绕灵巧操作过程中基于触觉信息的物体滑动预测难题,提出频率–时间融合网络FTFNet,实现灵巧操作中基于触觉的物体滑动高精度预测可应用于灵巧操作中意外滑动预测。
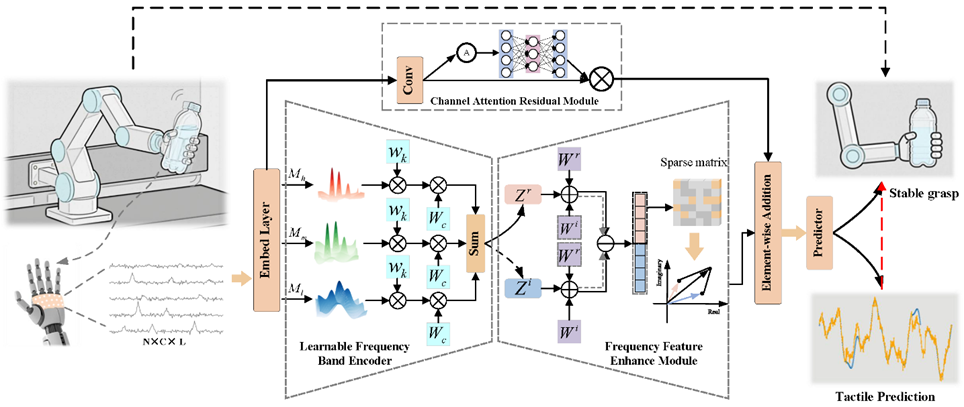
论文信息:Li X , Luo Y , Wang W ,et al.FTFNet: A Frequency–Time Fusion Network for Slip Prediction in Dexterous Robotic Manipulation[J].IEEE/ASME Transactions on Mechatronics, PP[2026-04-29].DOI:10.1109/TMECH.2026.3676123.
