



实验室成果在《IEEE Sensor Journal》上发表
2026年04月29日
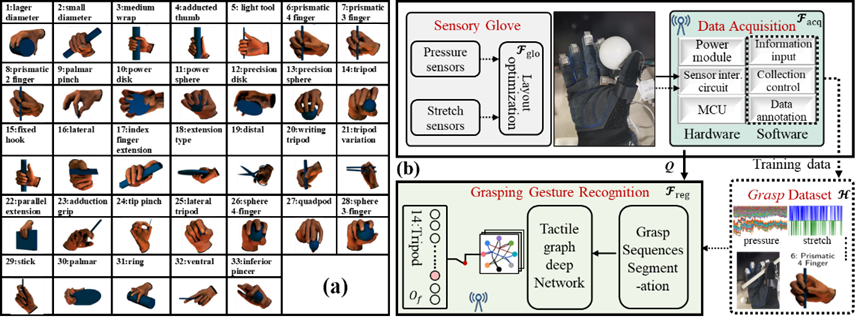
提出了面向细粒度人类抓握识别的数据手套系统 GloG。该系统通过抓握分类引导的传感器布局优化,采用11个压力传感区域和2个拉伸传感通道采集手部接触与弯曲信息。在此基础上,构建了覆盖Feix分类体系33类抓握动作的多模态数据集,并提出拓扑自适应图Transformer进行识别。系统在标准抓握数据和真实日常物体上均取得较高识别准确率,可为后续机器人操作学习提供人类抓握示范与识别基础。
论文信息:Li X , Du S , Jiang R ,et al.A Sensor-Optimized Data Glove for Taxonomy-Level Human Grasp Recognition[J].IEEE Sensors Journal, PP[2026-04-29].DOI:10.1109/JSEN.2026.3678973.
