



实验室成果在《IEEE/ASME Transactions on Mechatronics》上发表
2025年04月18日
实验室在柔性物体操控方向取得进展,论文 “Dual-Arm Robotic Fabric Manipulation with Quasi-static and Dynamic Primitives for Rapid Garment Flattening” 被期刊 IEEE/ASME Transactions on Mechatronics(T-Mech) 正式接收。
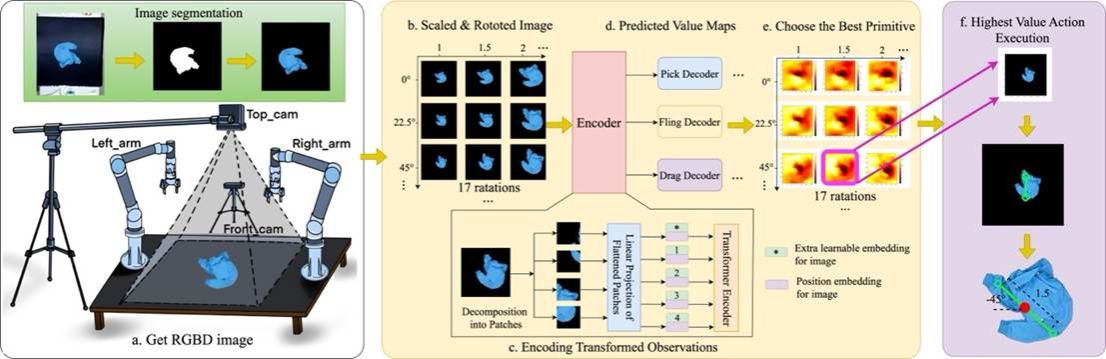
本研究面向机器人在真实环境中执行高效衣物展平任务的需求,提出了一套集成动态与静态操作原语的双臂控制系统。系统通过自监督学习策略,在无人工标注的条件下实现快速、高效的服装展开,并结合基于Transformer的感知模块,准确定位抓取点。与传统依赖多次交互的静态策略相比,该方法在多个类别服装上实现了显著的效率提升,在较少的交互次数下即可完成服装展平,同时具备良好的仿真到实物迁移能力,展示出较强的实际部署潜力。
论文信息:Changshi Zhou, Rong Jiang, Feng Luan, Shaoqiang Meng, Zhipeng Wang, Yanchao Dong, Yanmin Zhou, Bin He. Dual-Arm Robotic Fabric Manipulation with Quasi-static and Dynamic Primitives for Rapid Garment Flattening. IEEE/ASME Transactions on Mechatronics. doi: 10.1109/TMECH.2025.3556283. (2025)
