



实验室成果在《Measurement》上发表
2025年04月15日
实验室的研究团队在触觉重建领域取得进展。相研究成果以题为“A Practical Tactile Exploration with Enhanced Sampling for Fast Shape Estimation”的论文被Measurement (lF=5.2)期刊录用。
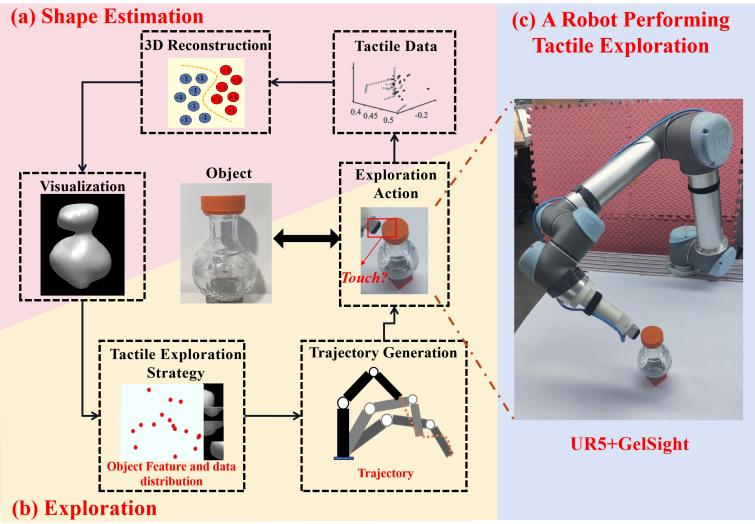
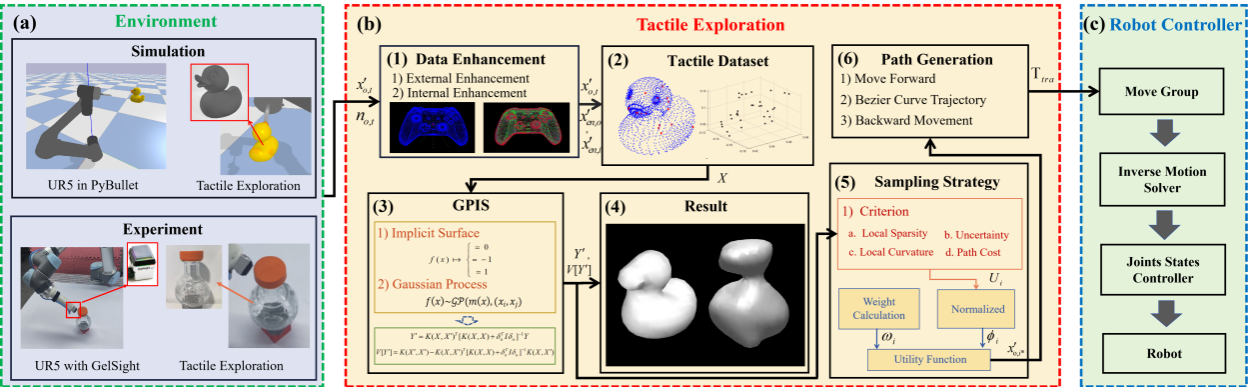
自动测量和三维重建有助于机器人了解复杂的环境。在黑暗或烟雾环境中,触觉感知至关重要。在此,我们提出了一种触觉探索方法,利用高斯过程隐含曲面(GPIS)来估计物体的形状,特别是考虑到物体的稀疏性和不均匀性。采用数据增强方法来提高隐式表面构造的触觉探索数据完整性,该方法结合了物体的外部和内部位置信息。此外,还构建了一种实用的采样策略,以提高受触觉数据不均匀分布限制的重建效率。该策略考虑了局部数据稀疏性、形状不确定性、局部形状曲率和探索路径成本,以实现系统而全面的数据采集。
论文信息:Feng Luan, Chengjin Wang, Zhipeng Wang, Jiguang Yue, Yanmin Zhou, Bin He. A practical tactile exploration with enhanced sampling for fast shape estimation. Measurement, 2025, 117350.
