



实验室成果在《IEEE/ASME Transactions on Mechatronics》上发表
2025年03月28日
实验室在人机技能学习研究领域取得进展,相关成果以题为“Diffusion-Driven Deep Decoding: Advancing EMG-Based Hand Skill Learning for Environment-Free Human–Robot Interaction” 在IEEE/ASME Transactions on Mechatronics(中科院一区top, IF=6.2)期刊发表。
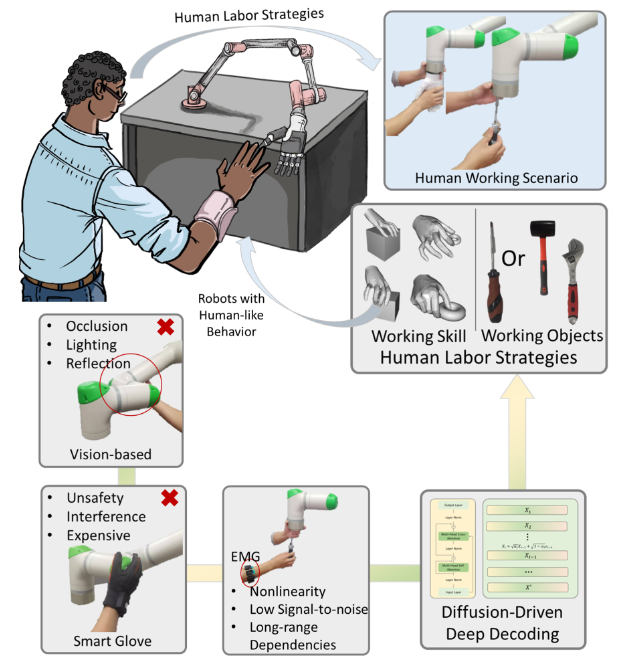
人类的劳动策略在各种场景中表现出高度的复杂性、适应性和多样性,因此其解码方法对于发展机器人类人的技能操作能力至关重要。当前基于光学和可穿戴设备的技能学习方法在实际工作环境中的适用性较低。在本文中,我们实现了对EMG信号的深度解码达到1.599度的角度跟踪误差以及92.7%的物体识别准确率,验证了其作为下一代人类技能策略解码范式的可行性。
论文信息:Kang, P., Jiang, S., & He, B. (2025). Diffusion-Driven Deep Decoding: Advancing EMG-Based Hand Skill Learning for Environment-Free Human–Robot Interaction. IEEE/ASME Transactions on Mechatronics.
