



实验室成果在《IEEE Transactions on AutomationScience and Engineering》上发表
2025年02月28日
实验室在机器人线缆操作研究上取得进展,相关成果以题为 “Learning Graph Dynamics With Interaction Effects Propagation for Deformable Linear Objects Shape Control” 被lEEE Transactions on AutomationScience and Engineering (lF=5.9) 期刊录用。
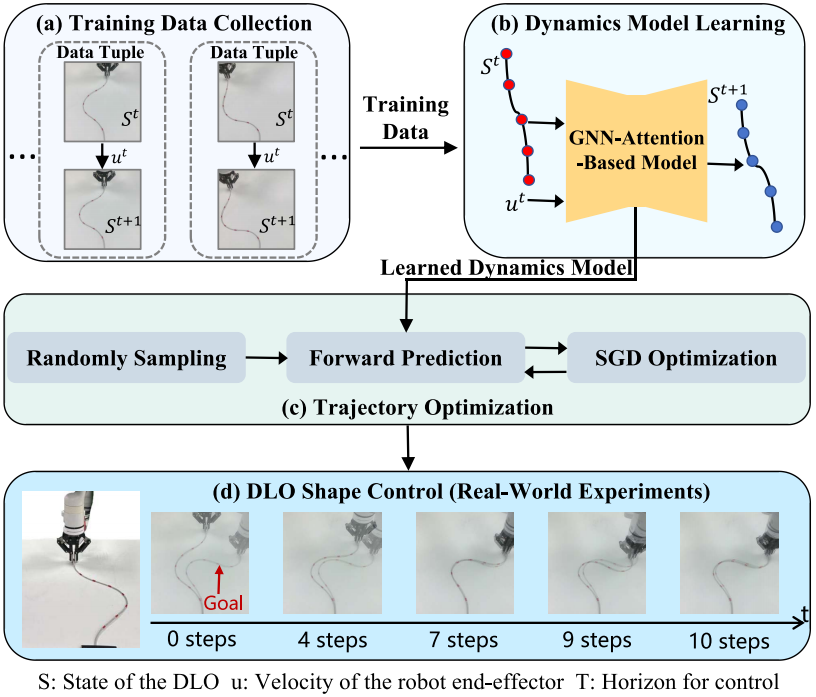
由于线缆具有无限自由度和复杂的材料属性,建立其动力学模型并实现精确操作具有较大挑战。针对这一问题,我们采用若干关键点表示线缆,并利用图神经网络建立线缆的动力学模型。通过模型预测控制方法生成操作动作。实验结果表明,所提出的方法在实现线缆精细操作方面表现出显著优势。
论文信息:F. Gu, H. Sang, Y. Zhou, J. Ma, R. Jiang, Z. Wang, B. He, “Learning Graph Dynamics With Interaction Effects Propagation for Deformable Linear Objects Shape Control”, lEEE Transactions on AutomationScience and Engineering, 2025
