



实验室成果在《IEEE Transactions on Industrial Electronics》上录用
2024年09月11日
实验室在机器人技能自主学习方法研究上取得进展,相关成果以题为 “GTHSL: A Goal-Task-driven Hierarchical Sharing Learning method to learn long-horizon tasks autonomously”被IEEE Transactions on Industrial Electronics(IF=7.5)期刊录用。
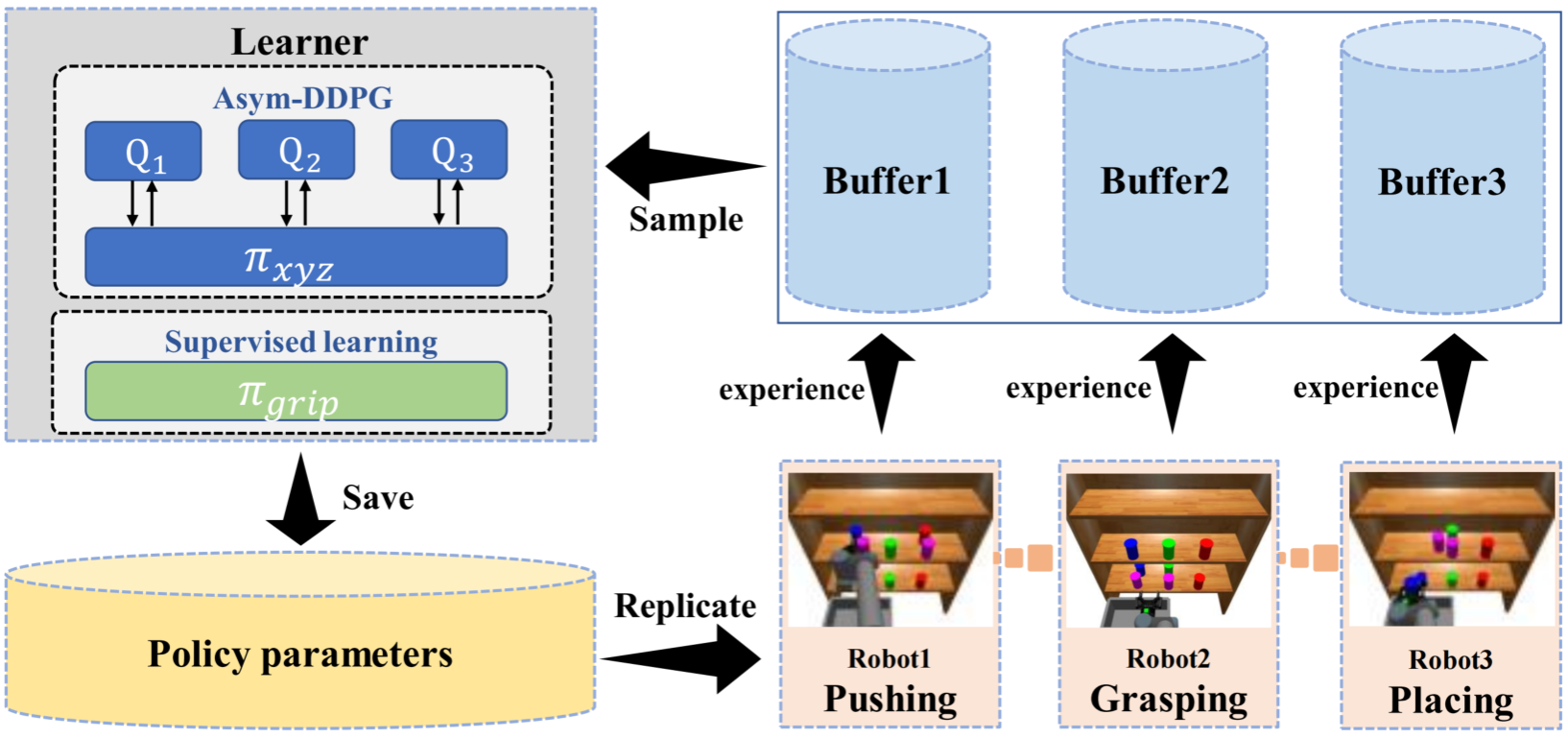
操作技能自主学习对机器人提高智能水平、应对复杂任务环境具有重要意义。数据驱动的学习方法已可以实现单一基础操作技能的自主学习,但在面对长序列复杂操作任务时依旧具有挑战。针对长序列操作技能自主学习难、模型参数多的问题,本文提出了一种目标-任务驱动的分层共享学习方法,并应用于有障碍场景下多物体取放这一典型长序列操作任务。实验结果表明,该方法可实现高效、轻量化地端到端自主学习。
论文信息:R. Jiang, X. Cheng, H. Sang, Z. Wang, Y. Zhou, B. He. GTHSL: A Goal-Task-driven Hierarchical Sharing Learning method to learn long-horizon tasks autonomously. IEEE Transactions on Industrial Electronics,2024.
