



实验室研究成果在《Advanced Engineering Informatics》上录用
2024年06月28日
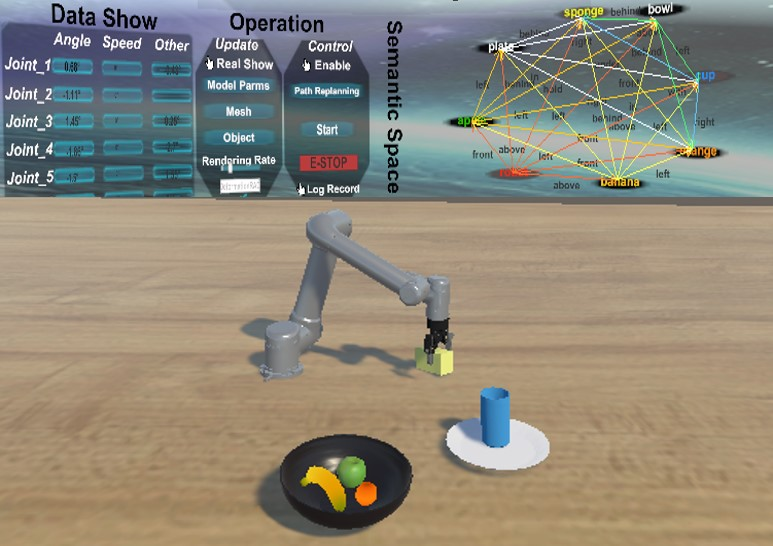
实验室在机器人操作数字孪生系统研究上取得进展。相关成果以题为“A digital twin system for Task-Replanning and Human-Robot control of robot manipulation”被Advanced Engineering Informatics(IF=8)期刊录用。
为了快速响应个性化制造的需求,增强机器人在动态复杂操作任务中的鲁棒性,启发于数字孪生的实时性和闭环特性,我们提出了一种新的DT原型系统,建立了一个双向信息反馈回路,用于操作任务重新规划和人机控制。
论文信息:X. Li, B. He, Z. Wang, Y. Zhou, G. Li and Z. Zhu, " A digital twin system for Task-Replanning and Human-Robot control of robot manipulation," Advanced Engineering Informatics, 2024.
