



实验室研究成果在《IEEE Transactions on Automation Science and Engineering》上录用
2024年09月10日
实验室在人机协作数字孪生系统研究上取得进展。相关成果以题为“Toward Cognitive Digital Twin System of Human–Robot Collaboration Manipulation”被IEEE Transactions on Automation Science and Engineering(IF=5.9)期刊录用。
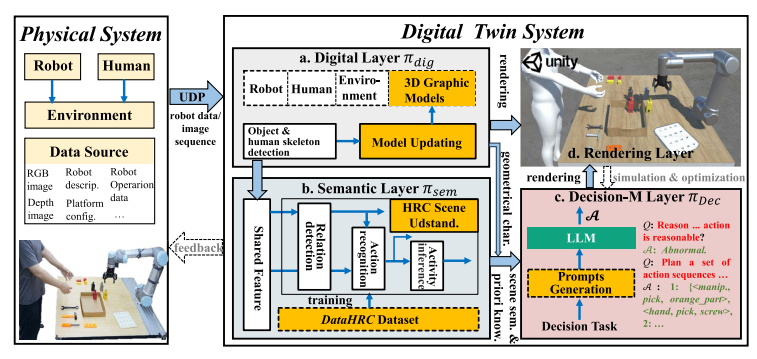
LLMs在各种机器人任务中取得了重大成功,表明它们有可能成为机器人决策的有力工具。基于此,我们将LLM与DT技术相结合,提出了一种HRC的认知DT系统,旨在将LLM整合到HRC系统的决策循环中,以提高柔性制造中HRC的生产效率。实验结果表明,所提出的方法可以处理不同HRC操作任务中的多种决策需求。
论文信息:X. Li, B. He, Z. Wang, Y. Zhou, G. Li and X. Li, "Toward Cognitive Digital Twin System of Human–Robot Collaboration Manipulation," IEEE Transactions on Automation Science and Engineering, 2024.
