



实验室在仿捕蝇草超快速感知-抓取一体化机器人研究方面取得进展。相关成果发表在仿生机器人领域国际知名期刊Bioinspiration & Biomimetics上,文章题为《Robotic flytrap with an ultra-sensitive “trichome” and fast-response “lobes”》。
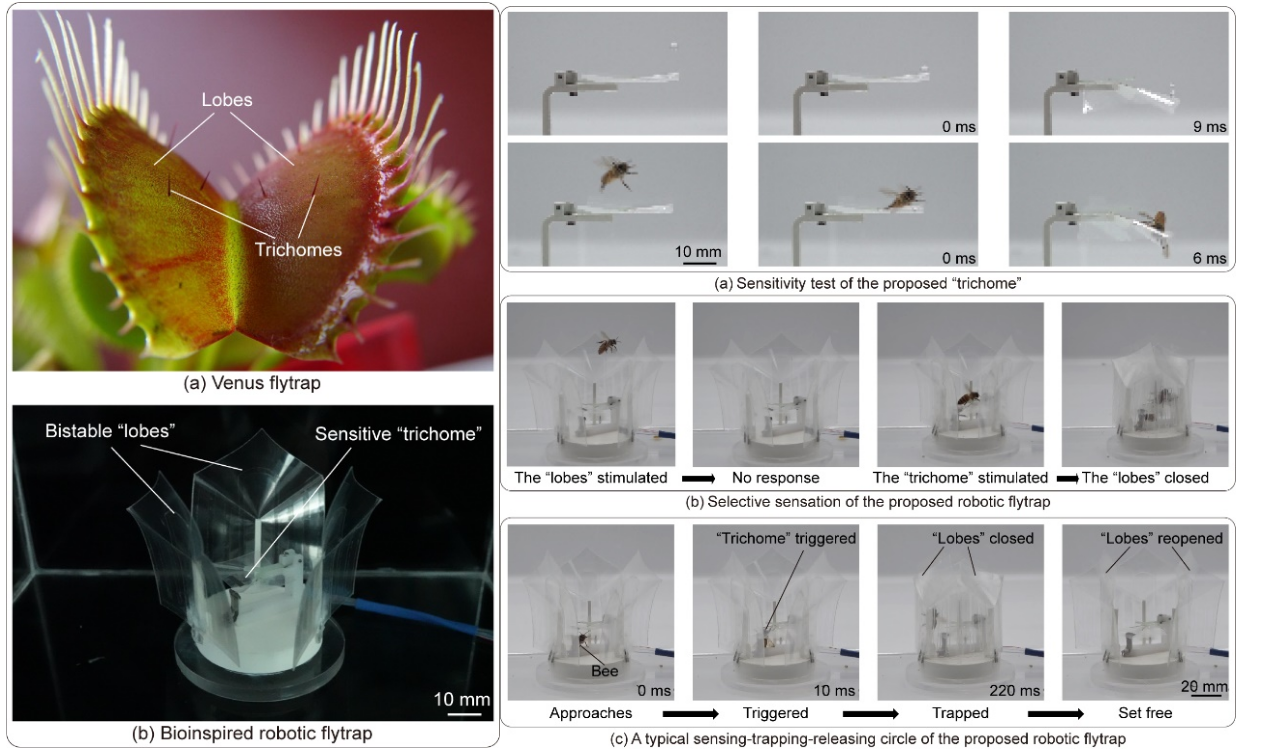
自然界中超灵敏感知和敏捷变形无处不在,赋予动植物高效捕食能力,以及对复杂环境的超强适应性。捕蝇草作为典型代表,能有效感知昆虫极其微小的物理刺激(毫牛级)并立即做出反应,因此启发了众多机器人设计和应用。然而,目前的机器人捕蝇草在重现昆虫超灵敏触觉感知方面面临挑战。此外,用机器人捕蝇草快速、全覆盖捕获活体昆虫仍然难以实现。本文我们报道了一种新型的机器人捕蝇草设计,它具有超灵敏的“毛状体”和双稳态快速响应“叶”。研究结果表明,所提出的机器人捕蝇草的“毛状体”可以检测并响应0.45 mN的外部刺激和重量为0.12克的飞蜂的微小触摸。此外,一旦“毛状体”被触发,双稳态“叶”可以在0.2秒内瞬间闭合,形成一个完全覆盖的笼子来捕获蜜蜂,并在测试后重新打开以释放它们。我们介绍了机器人捕蝇器的设计、建模、优化和验证,并展望了该技术在超灵敏感知、快速响应抓取和生物医学工程研究中的更广泛应用。
论文信息:Jiang Yongkang, Li Yingtian, Tong Xin, Wang Zhipeng, Zhou Yanmin*, He Bin*. Robotic flytrap with an ultra-sensitive “trichome” and fast-response “lobes”. Bioinspiration & Biomimetics, 2024, V19:056017.
