



实验室研究成果在《IEEE Transactions on Automation Science and Engineering》上录用
2024年08月16日
实验室在如何实现可变形物体稳定抓取的研究上取得进展。相关研究成果以题为“T-TD3: A Reinforcement Learning Framework for Stable Grasping of Deformable Objects Using Tactile Prior”被IEEE Transactions on Automation Science and Engineering (IF=5.9)录用。
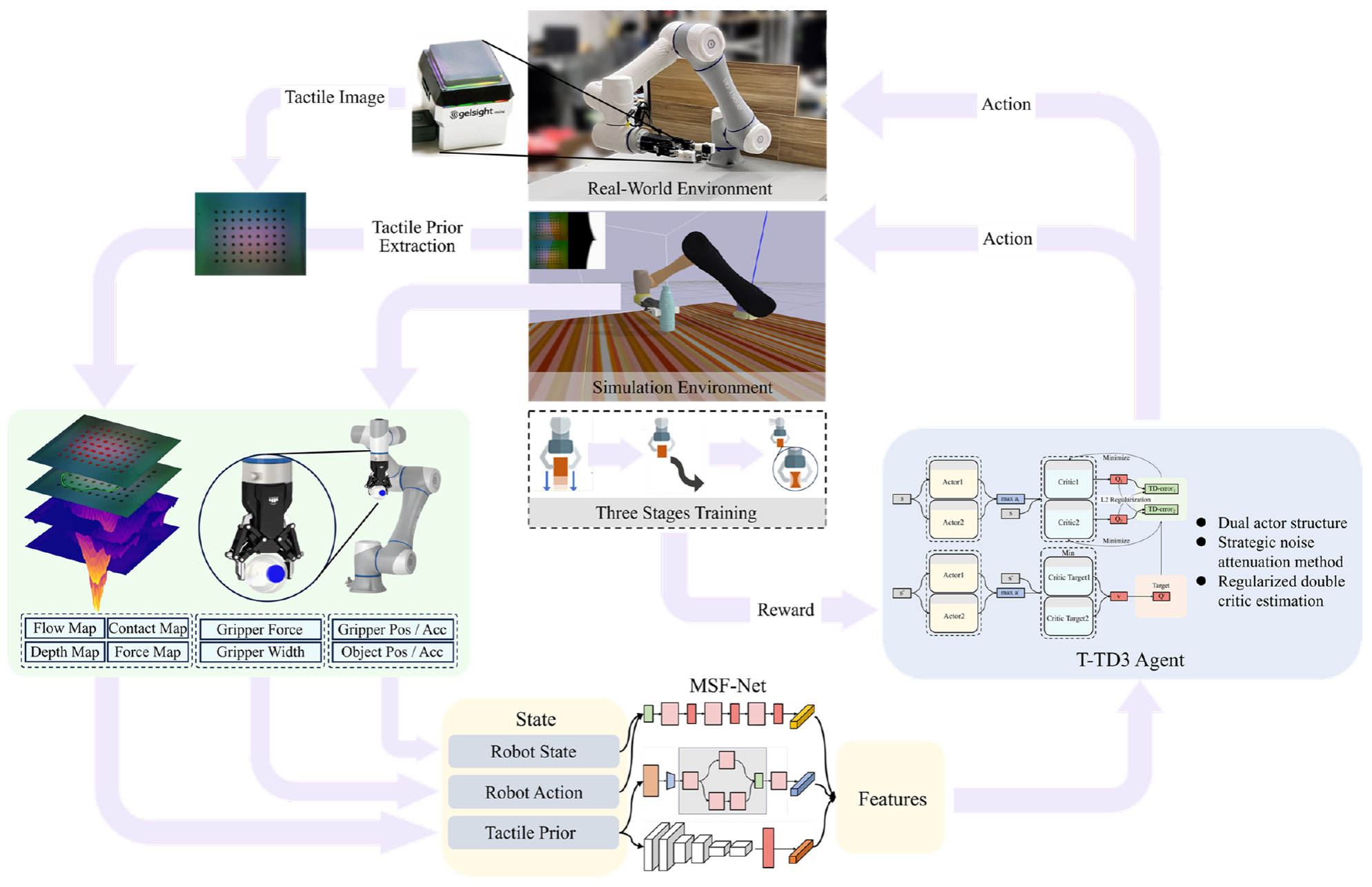
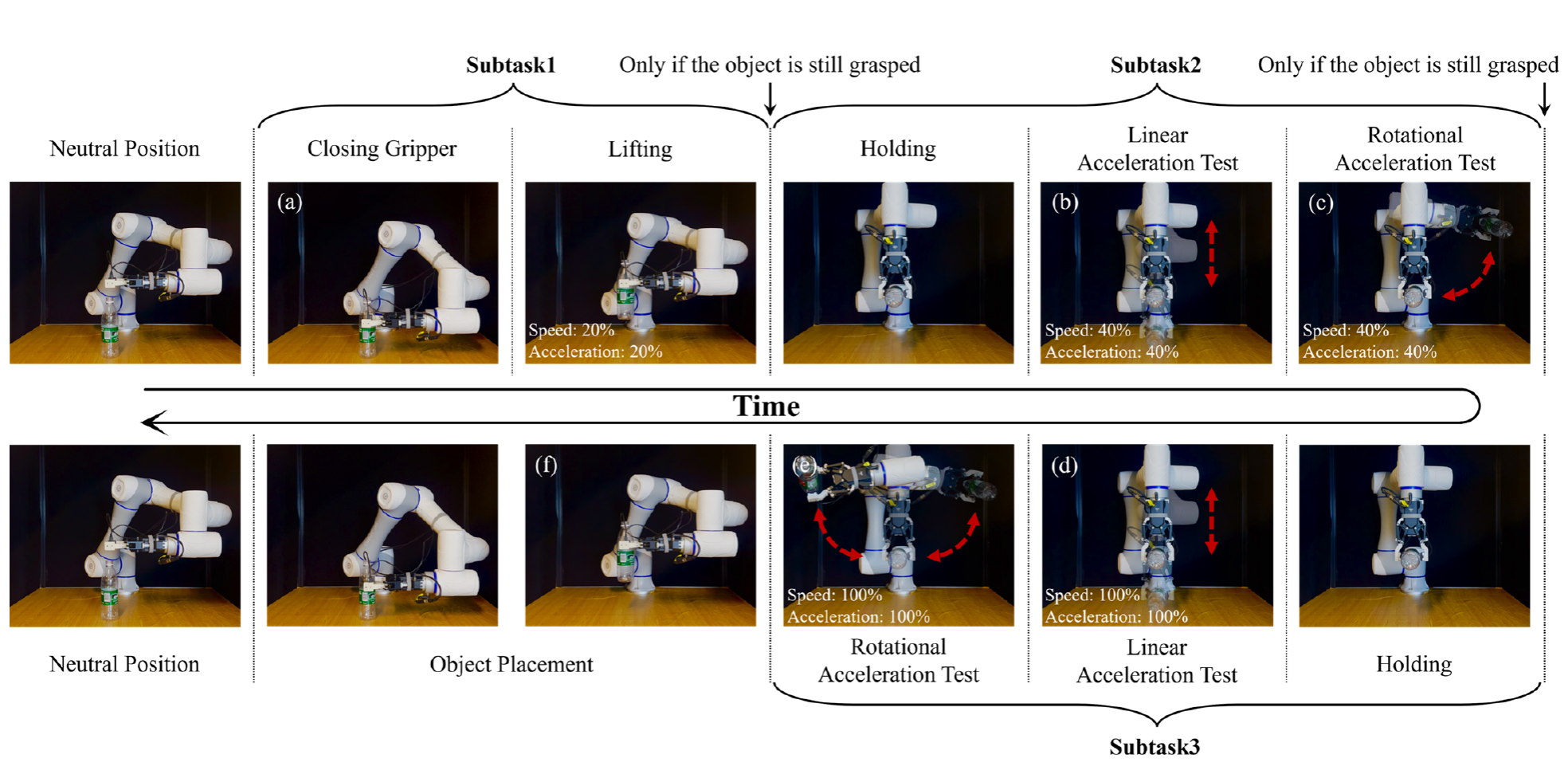
人类可以通过触觉感知对抓取可变形物体的状态进行快速判断,以施加正确的力避免过度形变和滑动,但这对于机器人来说仍然是一个具有挑战性的问题。因此针对上述问题,本文提出基于触觉先验的T-TD3算法,将机器人抓取可变形物体分解为滑动检测、稳定抓取评估以及最小抓取力跟踪三个子任务分别学习。同时本文构建了一个基于pybullet和tacto的仿真环境CR5GraspStableEnv。经过实验验证,机器人以94.81%的成功率实现了稳定抓取,并具有出色的sim2real能力。所提出的方法可以扩展到其他利用触觉传感器的稳定抓取任务中。
论文信息:Y. Zhou, Y. Jin, P. Lu, S. Jiang, Z. Wang, B. He, “T-TD3: A Reinforcement Learning Framework for Stable Grasping of Deformable Objects Using Tactile Prior”, IEEE Transactions on Automation Science and Engineering, 2024
