



实验室研究成果在《IEEE Transactions on Fuzzy Systems》上录用
2024年08月02日
实验室在如何实现刚柔耦合机械手的双向控制的研究上取得进展。相关研究成果以题为“A Novel Bidirectional Controlled Prosthetic Hand with Rigid-flexible Coupled Structure and Skin Stretch Feedback”被IEEE Transactions on Fuzzy Systems(IF=10.7)录用。
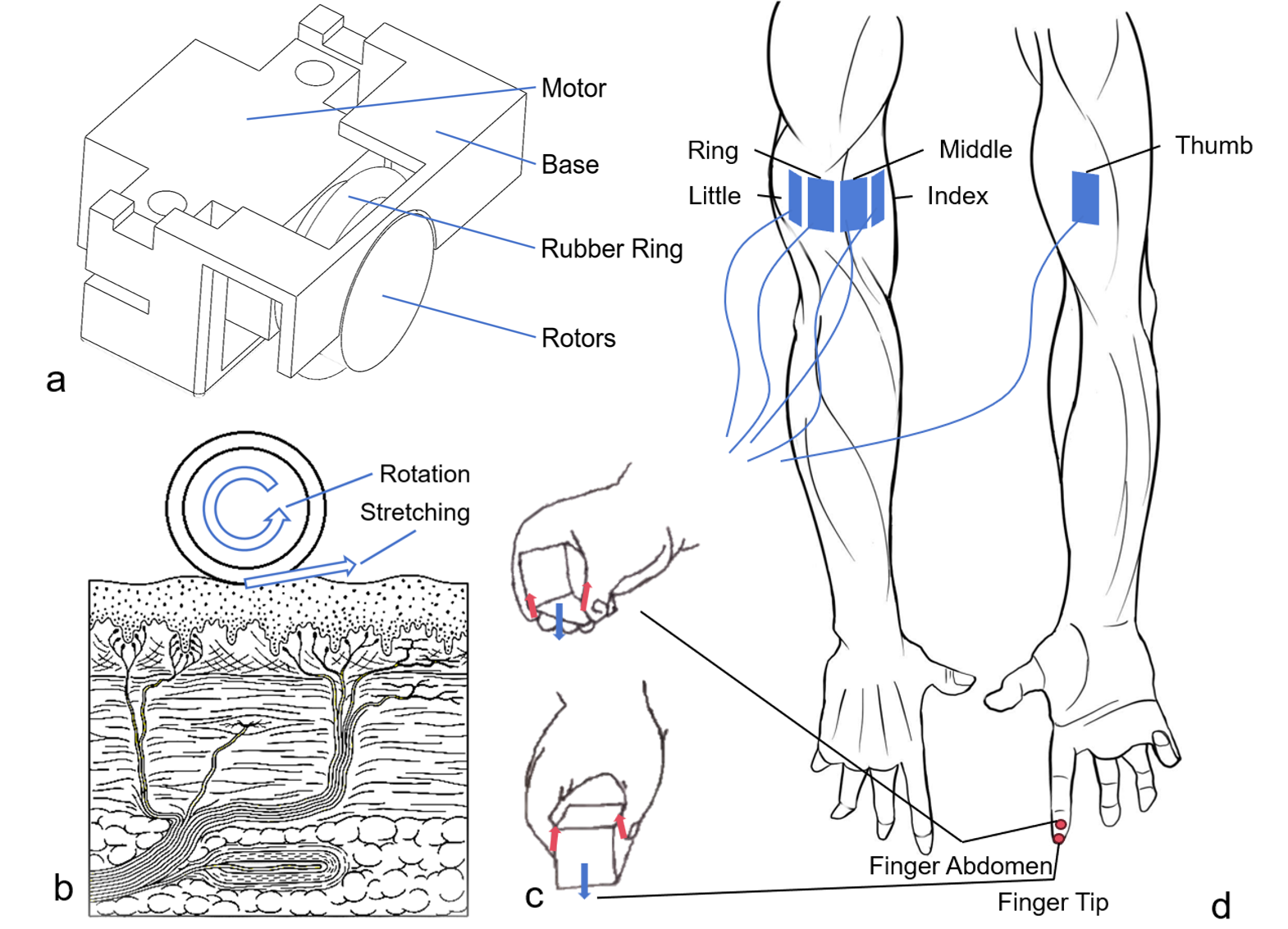
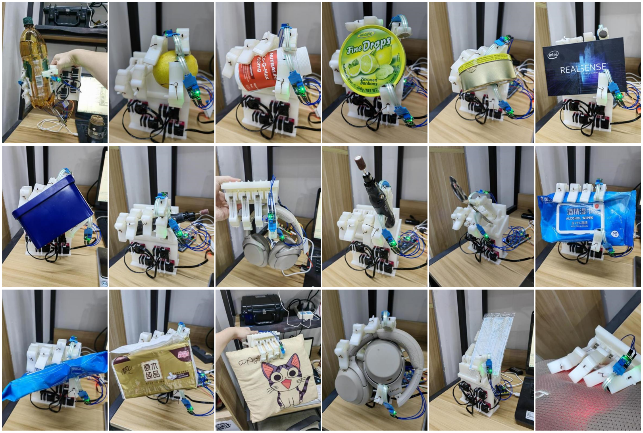
现有的机械手存在抓握适应性低、控制复杂和反馈困难等挑战。针对上述问题,本文研制了刚柔耦合机械手原型系统,研究了皮肤拉伸触觉反馈执行器阵列,提出了一种级联时空二型模糊触觉控制方法,并与表面肌电信号控制结合组成了一套完整的双向控制系统。经过实验验证,提出的机械手可以抓取工具、柔性物体、可形变物体等物品,触觉反馈效果相较传统方法还原了抓取触觉,重建了患者假肢手受力感知通路,且可以长时间佩戴。

|
|
论文信息:S. Xuan, F. Zeng, C. Bian, Z. Wang, Y. Zhou, S. Jiang,B. He. “A Novel Bidirectional Controlled Prosthetic Hand with Rigid-flexible Coupled Structure and Skin Stretch Feedback”, IEEE Transactions on Fuzzy Systems, 2024
