



实验室在人机交互安全控制策略研究方面取得进展,相关成果以题为“An active strategy for safe human-robot interaction based on visual tactile perception”的论文在2023年12月正式出版在期刊《IEEE Systems Journal》。
机器人技术和机器学习领域的最新发展使工业机器人能够在共享工作空间内与人类和谐协作,而不是局限于在围栏内重复动作。在这种人机交互(HRI)场景中,人与机器人之间密切而频繁的物理交互越来越常见,偶尔会发生碰撞,甚至造成严重伤害。安全是将机器人成功引入人类环境的必要前提。
在复杂环境下人机交互控制策略方面,我们提出了视触融合驱动的机器人主动安全交互策略,使用分层控制架构将接触前和接触后的策略相结合,从而确保整个人机交互过程的安全。内环利用全身顺应控制器来降低机器人全身的接触力,避免接触过大而造成危险。外环通过视觉感知预测碰撞提前减速,降低安全风险,并且将内力控制律简化为计算效率高的线性模型。与无安全策略相比,该策略在峰值力和脉冲力方面的安全改进率分别为2.19和2.56,具有明显优势。
|
|
| (a) | (b) |
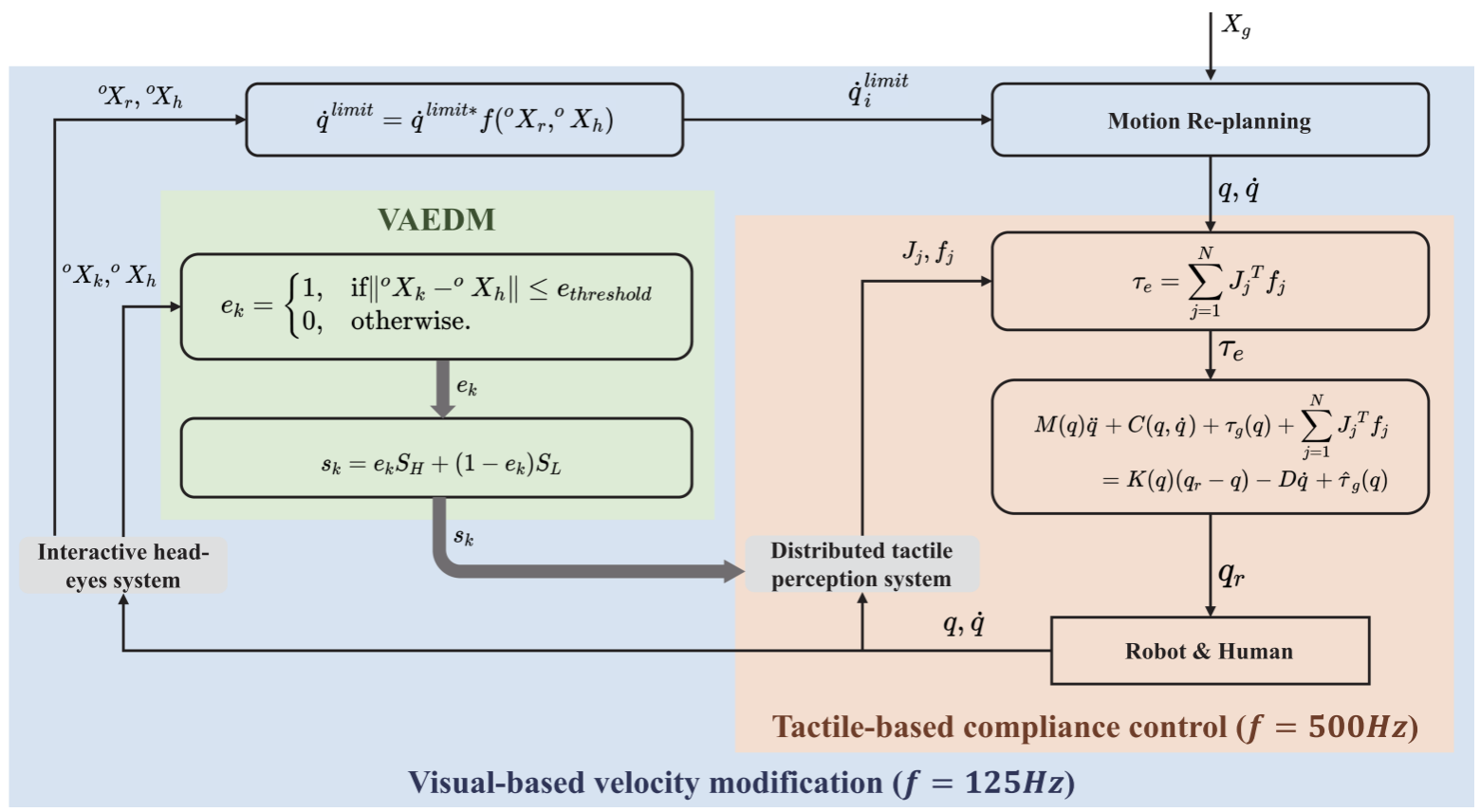
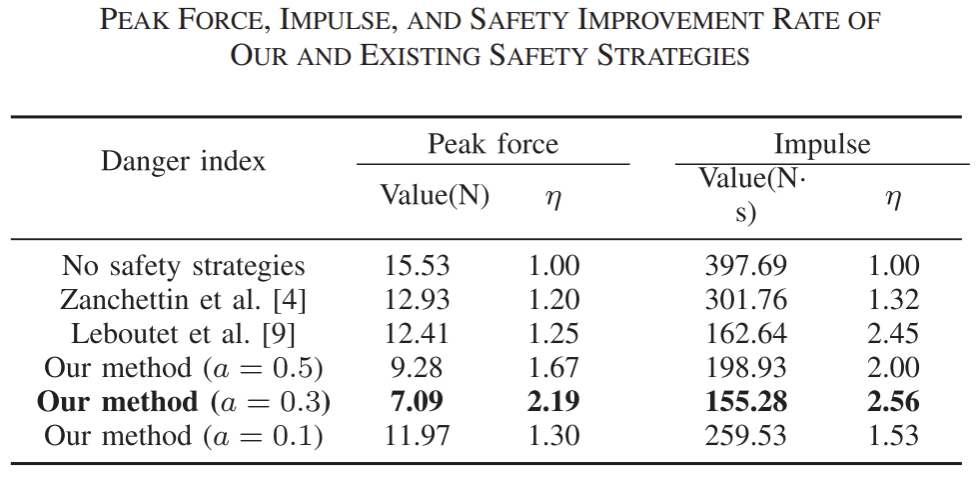
视触融合驱动的机器人主动安全交互策略:(a)策略框架图;(b)所提方法与现有方法在峰值力与脉冲力控制改进率上的比较。
论文信息:C. Xu, Y. Zhou, B He, et al., "An Active Strategy for Safe Human–Robot Interaction Based on Visual–Tactile Perception," in IEEE Systems Journal, vol. 17, no. 4, pp. 5555-5566, Dec. 2023, doi: 10.1109/JSYST.2023.3317328.(https://ieeexplore.ieee.org/abstract/document/10269073)
