



实验室在如何提高多无人机自主节能覆盖的研究上取得了进展。相关研究成果以题为“Trace Pheromone-Based Energy-Efficient UAV Dynamic Coverage Using Deep Reinforcement Learning”的论文于2024年1月在线出版在《IEEE Transactions on Cognitive Communications and Networking》(IF=8.6)。
无人机广泛应用于偏远灾害地区获取传感器以及灾害数据。然而,由于无人机的能量以及通信范围有限,因此,如何提高覆盖效率是多无人机动态覆盖的一个重要研究方向,需要灵活的覆盖路径规划算法。
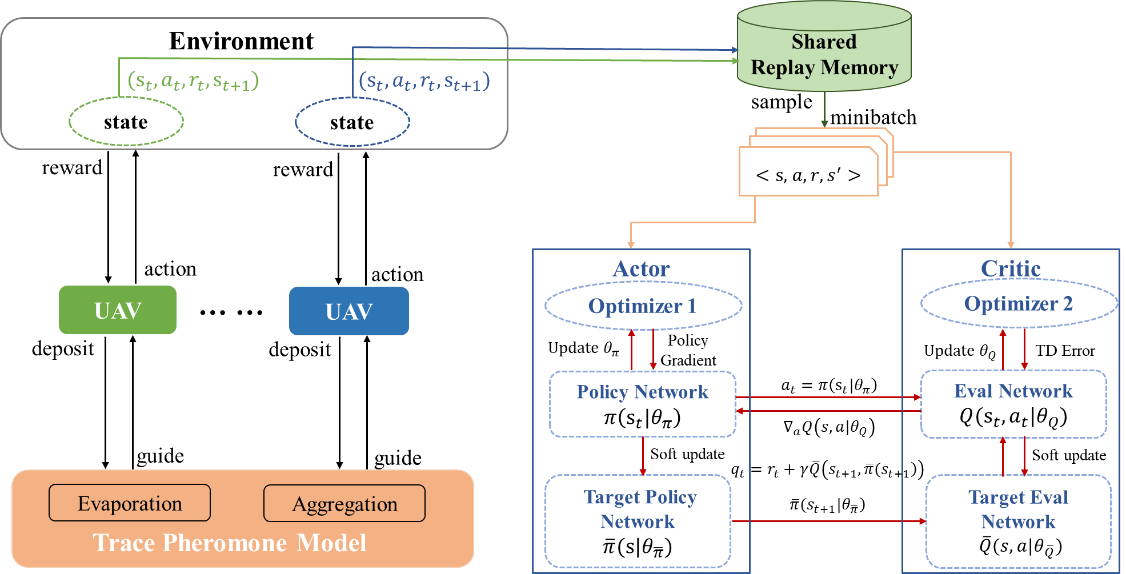
受自然界中群居昆虫使用化学物质作为它们交流媒介的启发,在这项工作中,我们提出了一种新颖的基于深度强化学习的多无人机运动控制方法,并利用踪迹信息素对无人机的飞行路径进行标记,实现多无人机高效节能的动态覆盖。首先,模拟蚁群的信息素机制提出了一种基于踪迹信息素的无人机通信框架。其次,结合深度强化学习算法实现多无人机的分布式动态控制。最后,大量的仿真结果表明:这项工作所提出的方法在覆盖效率、无人机能耗等指标都表现出较大优势。
论文信息:X. Cheng, R. Jiang, H. Sang, G. Li and B. He, "Trace Pheromone-Based Energy-Efficient UAV Dynamic Coverage Using Deep Reinforcement Learning," in IEEE Transactions on Cognitive Communications and Networking, doi: 10.1109/TCCN.2024.3350590.(https://ieeexplore.ieee.org/document/10382182)
