



实验室针对复杂生理环境中如何提升微纳机器人运动自主性的问题取得了进展。相关研究成果以题为“Autonomous Trajectory Tracking of Bioinspired Soft Microrollers Through a Novel Direction-Speed Decoupled Control Strategy”的论文于2024年5月在线出版在《IEEE Transactions on Automation Science and Engineering》(IF=5.9)。
微纳机器人由于其强大的运动能力和环境适应性在生物医学领域展现出巨大潜力。然而,由于非结构化生理环境的接触界面复杂,流体特性多变,因此,如何实现微纳机器人的自主轨迹跟踪对医疗任务精确安全地执行至关重要,但仍然具有挑战性。
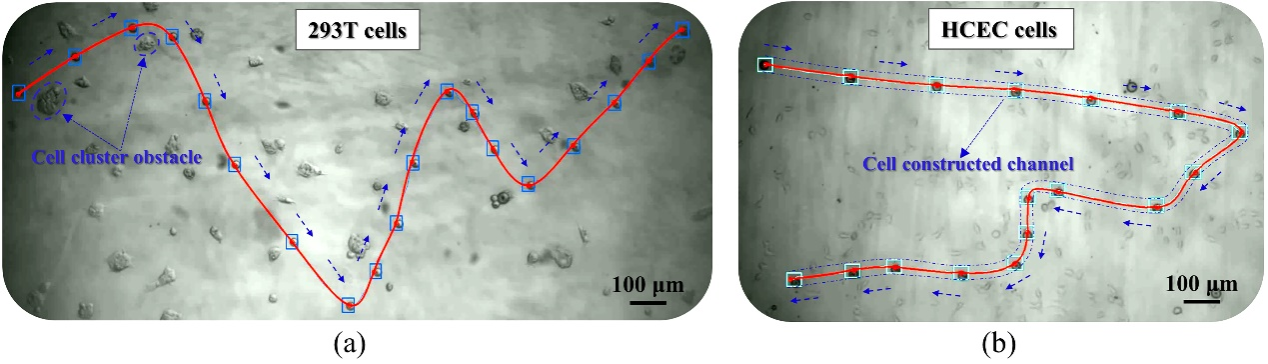
针对这一挑战,这项工作提出了一种用于微纳机器人自主轨迹跟踪的新型方向-速度解耦控制策略。首先,提出了一种基于扩展高阶状态的改进运动学模型,以捕捉微纳机器人的动态特性,增强其对非结构化环境的适应性。进一步,基于单独的误差状态设计了解耦合的方向和速度控制器,用于调整微纳机器人的横向和纵向运动,以提供更好的轨迹跟踪自主性。其次,制定了一种实时在线参数识别方法,无需繁琐的预实验获得实验拟合系数,可适用于一类滚动型微纳机器人。最后,在类生物环境中通过实验评估了所提出控制策略的性能,受生物启发的软体微纳机器人——BMM成功地在细胞团簇中导航并到达目标,显示了所提出的控制策略在真实生理环境中的潜力。
论文信息:W. Zhang, B. He, Z. Yin, C. Xu, Y. M. Zhou and Y. Cheng, " Autonomous Trajectory Tracking of Bioinspired Soft Microrollers Through a Novel Direction-Speed Decoupled Control Strategy," in IEEE Transactions on Automation Science and Engineering, doi: 10.1109/TASE.2024.3394238.(https://ieeexplore.ieee.org/document/10522626)
