



International Conference on Robotics and Automation(简称ICRA),是机器人领域最有影响力的国际学术会议之一,将于2024年5月13日-17日在日本横滨举办。

ICRA 2024共收到来自58个国家的3937篇投稿,经过由28个编辑,588个副编辑和6719个审稿人的评审,其中1765篇被录用,录用率仅为44.83%。
实验室五篇论文被ICRA 2024录用!
Goal-Conditioned Reinforcement Learning with Disentanglement-Based Reachability Planning
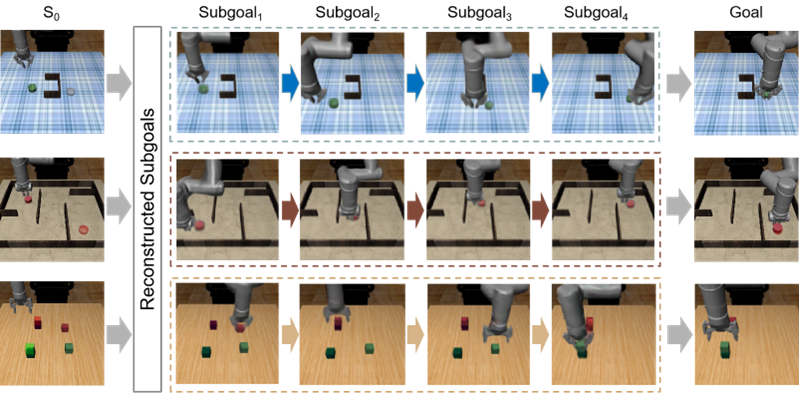
REPlan规划出的子目标重构图像
目标条件强化学习(Goal-Conditioned Reinforcement Learning,GCRL)能够将各种目标作为条件输入来训练智能体学习广泛的技能。然而,现有工作通常在长序列复杂任务中表现不佳,因为智能体难以在指数级增长的状态空间中探索到高质量状态来得到正向奖励。为此,本文提出了一种结合规划算法的新GCRL算法REPlan,通过规划出一系列短期子目标,从而增强GCRL算法实现长期目标的能力。本文提出了一种基于解耦表征的概率生成模块来学习一个紧凑表征空间,通过分支内熵损失和分支间熵损失来自监督地将机器人姿态和物体位置从复杂背景中解耦开。此外,设计了一个简单高效的可达性辨别模块来衡量子目标之间的可达性,从而能够在解耦表征空间中规划出合理可达的子目标序列。本文在绕障碍物推物体和叠木块等三个仿真环境和一个真实环境中进行了大量实验。实验结果表明:本文提出的目标条件强化学习算法在长序列任务中优于现有算法,在学习效率和任务成功率上都有较大提升。
GAN-Based Editable Movement Primitive from High-Variance Demonstrations
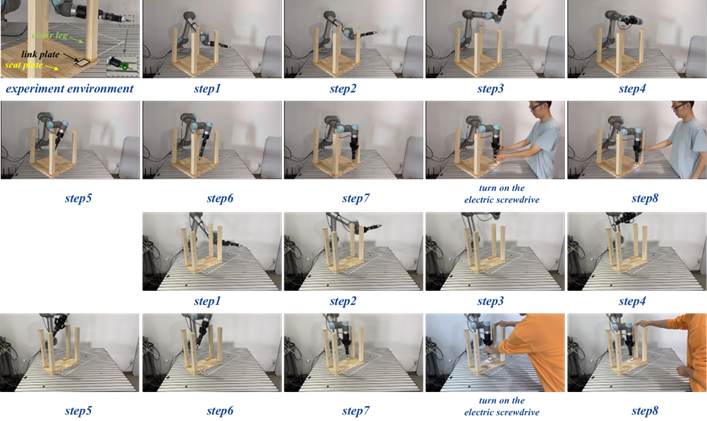
EditMP将习得的拧螺丝动作泛化到新环境中
动作原语(Mmovement Primitive,MP)可以从人类示范中学习动作,并将学习到的动作泛化到新的任务场景。提高机器人对场景中各种目标位置和障碍物的泛化能力是MP研究的一个主要目标。MP的泛化能力来自于学习示范中动作的变化。然而,目前的MP只能从低方差示范中学习动作。低方差示范仅考虑不同的目标位置,不考虑各种障碍物。然而,障碍物在日常生活中无处不在,这些MP不能生成可以适应不同障碍物的动作,这限制了他们的泛化能力。本文提出了一种新的基于生成对抗的可编辑运动原语(EditMP),它可以从高方差的示范中学习运动。这些示范考虑了不同目标位置和障碍物。经过动作学习,EditMP通过生成对抗逆映射,可控地编辑学习到的动作,泛化到新的任务场景。EditMP通过控制所有机器人关节来实现机器人整体避障。该方法在画矩形、桌面避障、椅子装配任务上进行了评估,在这些测试中EditMP的表现均优于现有的动作原语算法。
Ultrafast capturing in-flight objects with reprogrammable working speed ranges
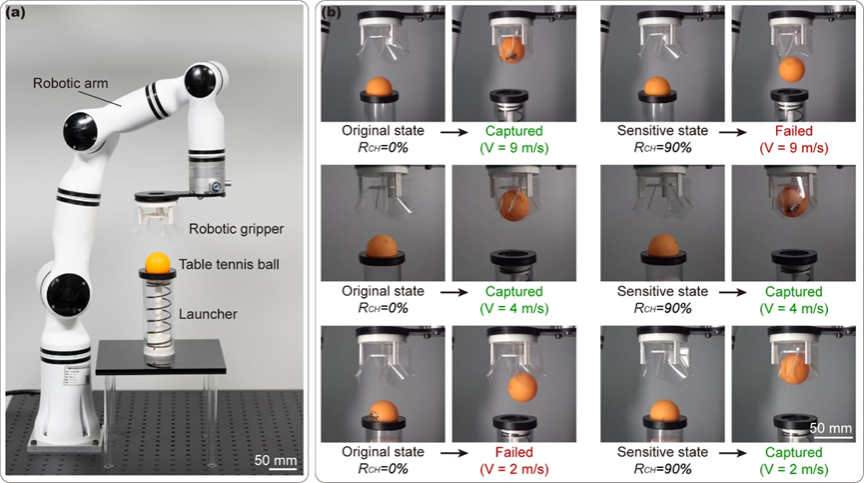
超快速抓持器实验验证:选择性抓取不同速度的飞行中物体
捕获高速飞行中物体的能力在自然界中至关重要,可以显著提高生物的生存能力和对环境的适应性。青蛙、豹子和鹰的捕食行为就是典型应用。尽管这种能力在自然界中广泛存在,但在工程实现中,捕捉快速移动的物体却极具挑战性。本文报告了一种基于可调双稳态结构的超快速抓持器。与目前仅适用于特定速度范围物体的抓持器设计不同,本文所提出的抓持器的工作速度范围可以通过控制结构的灵敏度来重新编程。我们详细介绍了所提出的抓持器的设计和制造过程,并引入了一个理论模型,用于构建结构的全域能量图谱以及抓持器在不同状态下的力学响应。结果显示,原始状态下,抓持器能够在仅6毫秒的时间抓取以15米/秒高速飞行的乒乓球。当调节所提出的抓持器至其超灵敏状态下时,仅以1米/秒的速度飞行的乒乓球也能够被捕获。这项工作拓宽了高速捕获设计的前沿,未来也可预见到更加广阔的应用前景。
Real-Time Trust Recognition in Human-Robot Cooperation Using EEG
![]()

基于脑电信号信任识别的Vision-Transformer模型
在人机合作过程中,人类对于自主系统的信任状态极大地影响着人类的决策和行为。因此,为了与人类实现高效、无缝的合作,自主系统应能够识别人类的信任程度,以预测人类行为并做出具有信任意识的决策。本研究针对这一需求,提出了一种基于脑电图的信任识别方法,用于在人机合作过程中实时识别人对于机器人的信任程度。我们采用了一个人机合作游戏场景来激发人类的各种信任水平,然后通过分析脑电信号进行信任识别。为了提高识别性能,该研究提出了一种EEG-Transformer模型,并结合三维空间表征法来捕捉脑电电极之间的空间拓扑关系。为了验证方法的有效性,我们构建了一个公开的人类脑电-信任数据集EEGTrust,并在在该数据集上进行了实验验证。我们的方法在Slice-wise交叉验证中达到了74.99%的准确率,在Trial-wise交叉验证中达到了69.15%的准确率,表明其在识别准确率和泛化性方面都优于基线模型。此外,一项消融研究表明,空间表征法显著地提高了信任识别的性能。源代码和EEGTrust数据集请见https://github.com/CaiyueXu/EEGTrust。
X-Tacformer : Spatio-temporal Attention Model for Tactile Recognition
![]()
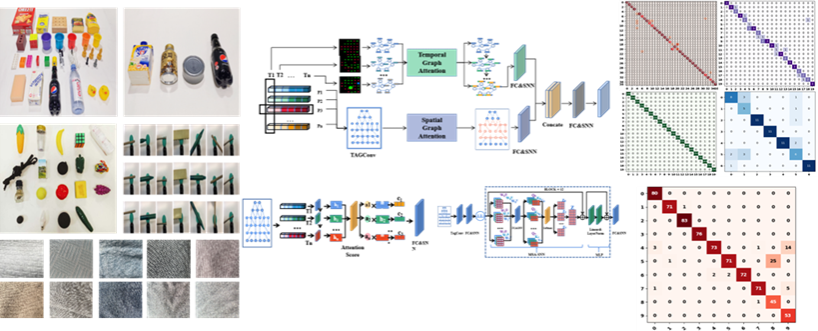
X-Tacformer 整体框架
触觉在探索未知形状物体时发挥着重要作用。在探索过程中产生的触觉数据含有大量的时序信息和空间信息,时序信息和空间信息在识别任务中没有被充分利用,导致识别效果差,识别精度低等问题。为了解决这些问题,本文提出了时空注意力模型,以双通道的形式分别提取触觉数据中的时序特征和空间特征,利用图神经网络的多点连接特性对数据进行编码,通过注意力机制和脉冲神经网络进行解码,能够大大提升特征提取的效果。此外,为了测试该模型在不同的触觉探索过程中的通用性,本文还通过拟人的方式操作机械手指尖对布料进行撵动,构建了一个私有数据集。本文在三个物体识别数据集、一个滑移检测数据集和一个布料检测数据集上进行了实验,并且应用了触觉数据增强技术对数据集进行扩充。实验结果表明:本文使用的触觉数据增强技术能够提升识别准确率,本文提出的时空注意力模型在识别准确性等性能上有较大提升。
