



实验室在机器人可穿戴多模态触觉感知电子皮肤研究方面取得进展,相关成果以题为“TacSuit: A wearable large-area, bioinspired multi-modal tactile skin for collaborative robots”的论文在2023年4月正式出版在期刊《IEEE Transactions on Industrial Electronics》。
当前机器人与人类紧密协同,与环境、人类和其他机器人一起交互合作。安全性是人-机协同交互的重要前提。触觉感知是机器人视觉感知的必要补充,提供了环境的补充信息,如质地、柔软度、温度以及力学接触刺激如滑动、振动等。另一方面,触觉感知对于像机器人精细操作等任务也是必不可少的。
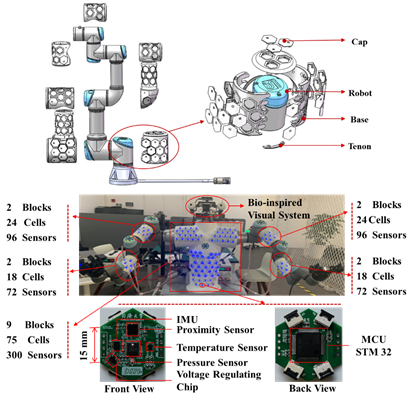
受人类皮肤触觉系统的启发,在这项工作中,我们提出了一种定制的、可穿戴的模块化机器人触觉感知皮肤(TacSuit),并实现了159个多模态触觉感知单元的穿戴。该皮肤由易于访问的多模态传感器组成,包括压力、接近、加速度和温度传感器;具有可扩展性,适用于机器人的大面积表面覆盖。TacSuit在机械结构和数据融合算法方面进行了联合设计,包括三个层次的设计:传感器、单元(多模态传感器)和区域(多个感知单元)。这些传感器存储在定制设计和3D打印的胶囊结构中,以实现一致性、可扩展性,并易于安装到任意机器人表面。多级事件驱动的数据融合算法能够对大量触觉传感器进行有效的信息处理。在此基础上,提出了一种虚拟交互力融合方法,该方法同时考虑了物理直接接触前后交互过程的临近性和交互力感知信息,实现了物理直接接触前后交互全过程的安全性。
Y. Zhou, J. Zhao, P. Lu, Z. Wang and B. He, "TacSuit: A wearable large-area, bioinspired multi-modal tactile skin for collaborative robots," in IEEE Transactions on Industrial Electronics. doi: 10.1109/TIE.2023.3253921 (http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=10068344&isnumber=4387790)
