



课题组对具身智能中交互式学习及其泛化评估的研究取得了相关进展。相关研究成果以题为“Scene Augmentation Methods for Interactive Embodied AI Tasks”的论文与2023年3月正式出版在期刊《IEEE Transactions on Instrumentation and Measurement》(IF=5.332)
具身智能学习范式使得智能机器人能够像人类一样从交互中进行学习,因此被认为是实现普适人工智能的有效途径。然而,由于具身智能模拟器提供的训练环境有限,即使是目前表现最好的智能体存在过拟合问题,并很难将其泛化到未知场景。
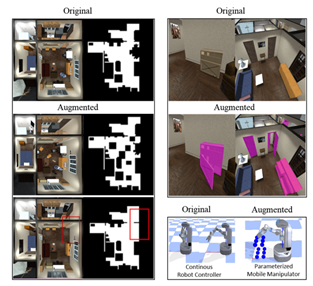
为了缓解这一问题,我们首先提出了一种场景增强策略,可以自动导出具有不同分布的场景布局或物体状态,以提供足够的环境转移模型和提升场景多样性。然后,介绍了如何使用所提出的方法对交互式智能体的泛化能力进行系统性分析,以研究智能体泛化到新布局、新对象和新对象状态的能力。最后通过实验验证和分析,说明了场景增强在交互式具身学习任务的作用。
论文代码已经公开: https://github.com/sanghongrui/SceneAug
论文信息:
H. Sang, R. Jiang, Z. Wang, Y. Zhou, P. Lu and B. He, "Scene Augmentation Methods for Interactive Embodied AI Tasks," in IEEE Transactions on Instrumentation and Measurement, vol. 72, pp. 1-11, 2023, Art no. 2508911, doi: 10.1109/TIM.2023.3259033. (https://ieeexplore.ieee.org/document/10076904)
