文章“Multisource Model-Driven Digital Twin System of Robotic Assembly”发表于《IEEE systems journal》
2020年12月17日
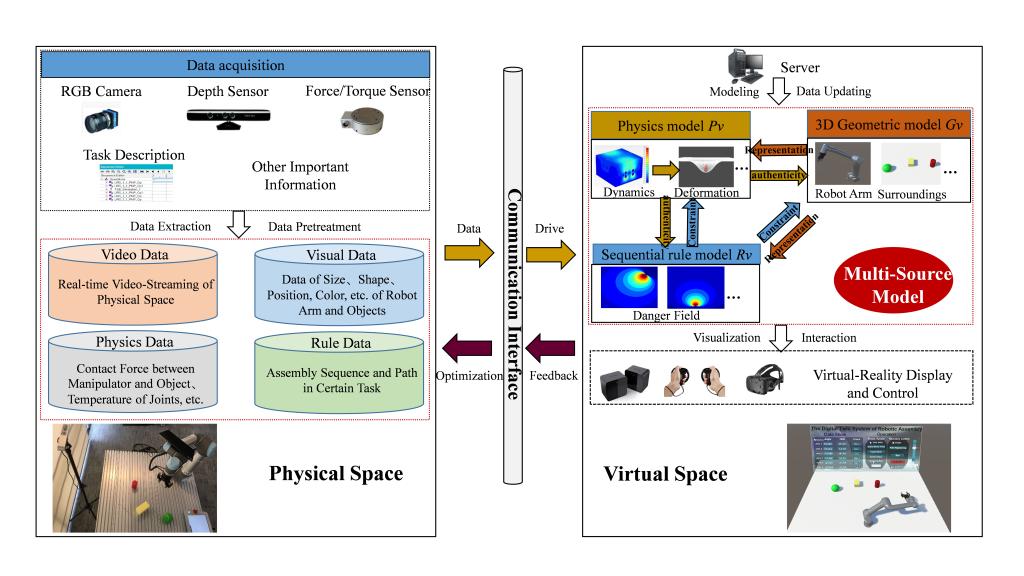
在自动化工业制造中,相当一部分工作是由机器人装配操作完成的。然而,随着工业和信息技术的迅速发展,装配工艺越来越复杂,导致装配失败率和维修成本的增加。因此,对装配过程进行实时精确监控和优化的能力逐渐成为研究的重点。数字孪生体的出现和迅速发展为解决上述问题提供了新的途径。本文基于多源多模态建模的思想,提出了一种多源模型驱动的数字孪生系统(MSDTS),该系统适用于机器人的装配,如接触和移动物体。具体的成果以“Multisource Model-Driven Digital Twin System of Robotic Assembly”发表在《IEEE systems journal》。
与以往研究不同的是,本文给出了数字孪生系统的详细实现方法,实现了物理空间的精确实时映射。这种方法有几个优点。首先,该系统集成了几何、物理和序列规则等多源信息。其次,由于建模方法的通用性和低复杂性,整个系统成本低,易于扩展。第三,利用虚拟现实技术渲染虚拟空间,操作者可以观察工作过程和内部情况。
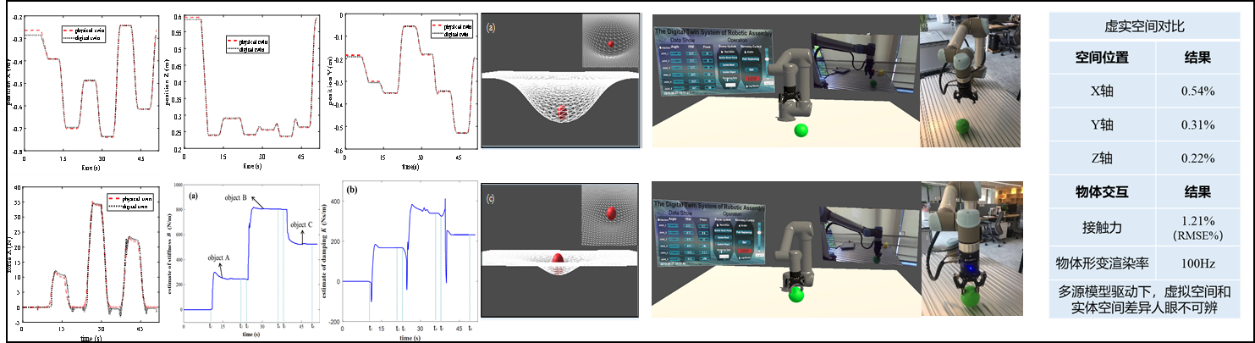
实验结果表明:构建的交互场景孪生系统平台,实现了机-环接触力、位置等实时跟踪,可以用于机器人-环境交互的精确实时模拟。