



课题组在基于视觉的未知室内环境中的目标导航方法中取得进展。相关研究成果以题为“A Novel Neural Multi-store Memory Network for Autonomous Visual Navigation in Unknown Environment”的论文于2022年1月正式出版在期刊《IEEE Robotics and Automation Letters》,并已被机器人顶级会议ICRA (International Conference on Robotics and Automation) 接收。
为了满足各种专项需求,智能机器人首先需要完成一些基础的任务,而实现自主导航则是其中一种。通过视觉进行自主导航,可以使机器人摆脱对场景地图的依赖,更快速的进行任务部署以及任务拓展。尽管基于深度学习的方法取得了巨大成就,但智能导航机器人还存在着难以基于长时间观测序列进行推理和语义理解的问题。导致这种问题的主要原因是目前常用的记忆网络,如RNNs等,在长时间序列学习方面存在困难,不能建立任务所需的长序列跨度的时间依赖。
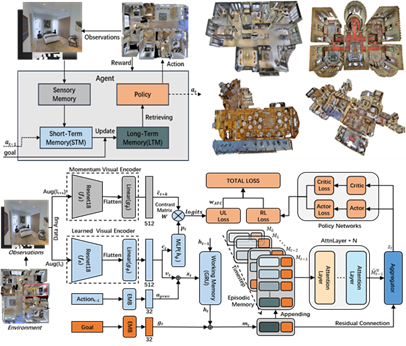
受人类记忆机制的启发,我们将多存储记忆神经网络引入到目标驱动视觉导航任务的强化学习框架中。所提出的记忆网络利用记忆的三个时间阶段来建立时间依赖性,以便更好地理解场景。首先感觉记忆对视觉观测进行编码,并将此瞬时信息嵌入工作记忆中。工作记忆是一种短期记忆,由具有门控的RNN实现。然后,长期存储器将RNN的每个时间步的潜在状态存储到长期记忆的情景缓冲区。最后,设计了一种基于自注意机制的记忆提取器,从长时记忆中提取目标相关的信息。所提出的方法只依赖于机器人本体的视觉传感器而不需要任何位置传感器或预先训练好的模型,就可以实现在大范围的未知室内环境中进行目标导航。
论文信息:
H. Sang, R. Jiang, Z. Wang, Y. Zhou and B. He, "A Novel Neural Multi-Store Memory Network for Autonomous Visual Navigation in Unknown Environment," in IEEE Robotics and Automation Letters, vol. 7, no. 2, pp. 2039-2046, April 2022, doi:10.1109/LRA.2022.3140795. (https://ieeexplore.ieee.org/document/9672680)
