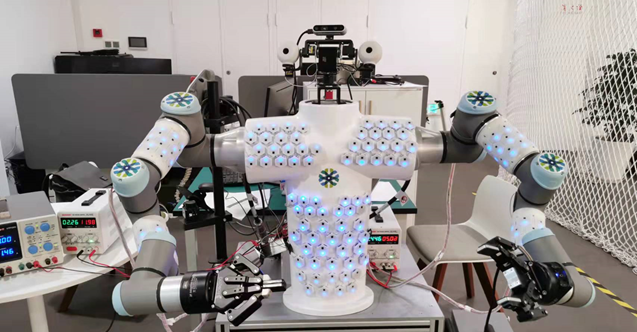
人机智能交互是当前机器人技术发展的前沿趋势之一。其中,触觉是机器人不可或缺的重要感知手段。与视觉相比,触觉反馈能够提供接触物的材质、形貌及接触力等信息,具有改善机器人与人进行交互的潜力。而皮肤是人体最大的感知器官,为人类与环境的交互提供重要反馈信息。为此,我们将综合利用仿生学、机器人学及材料科学等多学科知识,构建机器人仿生电子皮肤(E-Skin),为人机智能交互、机器人智能发育以及机器人复杂环境的适应能力提供关键感知信息。